La trattazione fasoriale di un circuito elettrico può risultare incompleta. Un “Fasore” infatti è un numero complesso che (sul piano complesso) descrive una sinusoide di frequenza ben definita. La legge di Ohm permette di mettere in relazione Tensione e Corrente (il cui rapporto viene definito “impedenza”) .
NOTA : La legge di Ohm ha una chiave di lettura ben definita:

“in un bipolo resistivo Il rapporto tra tensione e corrente è costante ed è pari alla Resistenza”
Un fasore è quindi “definibile” sono per grandezze sinusoidali.
Definendo la frequenza 



Il “Valore Efficace” (o “rms” , “Root Mean Square”, “valore quadratico medio”) è definito come:
![X _ {rms } = \sqrt{\frac{1}{T}\int_ {0}^{T} [x(t)]^2 dt}](https://s0.wp.com/latex.php?latex=X+_+%7Brms+%7D+++%3D+%5Csqrt%7B%5Cfrac%7B1%7D%7BT%7D%5Cint_+%7B0%7D%5E%7BT%7D+%5Bx%28t%29%5D%5E2+dt%7D&bg=ffffff&fg=424242&s=0&c=20201002)
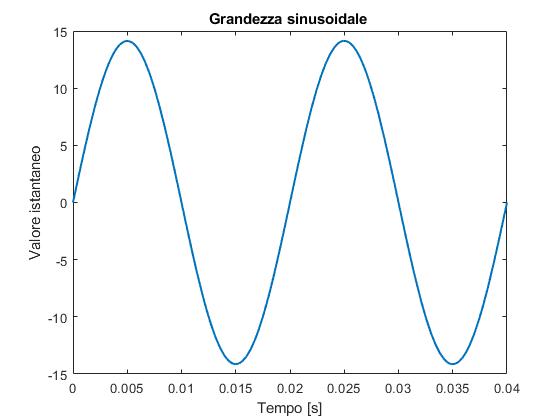
Per una sinusoide, conoscendone il picco Xmax, si può scrivere:

Ed è quindi definibile il fasore. Se non si tratta di una sinusoide, come spesso accade le grandezze sono distorte, la precedente relazione non è più vera. Venendo a mancare l’andamento sinusoidale, il calcolo fasoriale perde di validità, portando ad errori sempre maggiori. Si noti che, ad esempio, i “tester” a “vero valore efficace” (true r.m.s.) eseguono calcoli (partendo dalla misurazione) partendo dalla definizione stessa di valore “rms”: il “firmware” ricostruisce gli andamenti delle grandezze nel tempo per poi applicare la definizione di “valore quadratico medio” (formula integrale) . Questo consente di avere una misura ottimale anche in caso di distrosione, cosa che non accade nei normali tester che basano il proprio funzionamento sul calcolo fasoriale (questi ultimi stano scomparando grazie all’aumento della “densità tecnologica” a cui sono sogetti tutti i dispositivi).
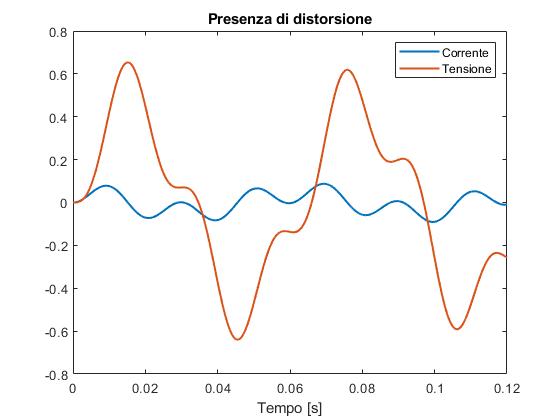
Le cause di distorisione sono molteplici: Presenza di componenti non lineari (es. diodi), falsi contatti, drenaggi di corrente (es. verso terra), “effetto corona” ecc. Si osservano quindi Tensioni e Correnti non sinusoidali. Inoltre, al variare di parametri o delle alimentazioni (esempio nella “presa di carico” di un motore elettrico o i primi istanti di alimentazione di un circuito) si hanno delle oscillazioni fino alla condizione di regime: dunque, nelle fasi di avviamento ad esempio, si avranno dei “transitori” e non è possibile quindi usare i fasori. Ad esempio, una grandezza a “gradino”(applicazione tensione continua ad un determinato istante, leggasi chiusura dell’interruttore!) il calcolo fasoriale sarebbe un errore concettuale (si pensi alla corrente continua, i fasori non sono definibili).
Si può pensare di scomporre la funzione non sinusoidale con la “Serie di Fourier”, ovvero come sommatoria di funzioni sinusoidali (opportunatamente calcolate) e utilizzare i fasori ad ogni ordine armonico (si tenga presente però che idealmente le armoniche sono infinite, pertanto è necessario approssimare). Oppure, come varrà illustrato in questa sede, si ricorre alle “equazioni costitive dei singoli componenti” risolvendo quindi equazioni differenziali.
Prima di procedere è consigliabile rammentare la definizione di “inerzia”.
Notare che in questa sede si utilizzerà la convenzione dei generatori e il sistema viene considerato a “costanti compatte”:
Resistenza R

Si applica tensione e la corrente assumerà istantaneamente il valore massimo calcolabile con la legge di Ohm. La trasformazione di potenza avviene grazie ad essa (gli altri bipoli “immagazzinano” energia ma non vi è trasformazione).
Induttanza L

La tensione ai capi dell’induttore è data dalla variazione di flusso ad esso concatenato. “L” rappresenta l’accoppiamento magnetico che ha con se stesso . Numericamente, l’autoinduttanza “L”, rappresenta il flusso di Induzione Magnetica che viene concatenato quando l’avvolgimento stesso è percorso da “1A” (le Mutue Induttanze non vengono considerate in quesa sede) . Osservando l’espressione si capisce perchè in un induttore la corrente è in ritardo rispetto alla tensione. Per inerzia il sistema tende ad opporsi alle variazioni di flusso:Tali variazioni sono dovute alle variazioni di corrente. Opponendosi quindi alle variazioni di corrente, che non può quindi variare a gradino. Applicando una tensione si osserverà una corrente “in ritardo”: tale aspetto emerge chiaramente a regime sinusoidale ove si può facilmente osservare un ritardo di 1/4 di periodo.
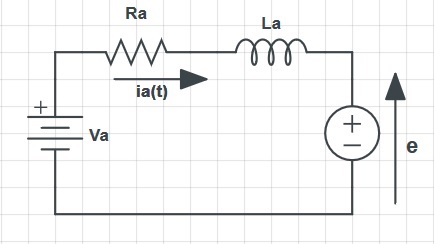
Si consideri un circuito R-L alimentato con una tensione a gradino.
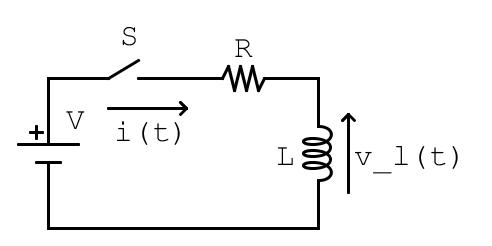
Il sistema utilizzato è il seguente:

La soluzione analitica è:



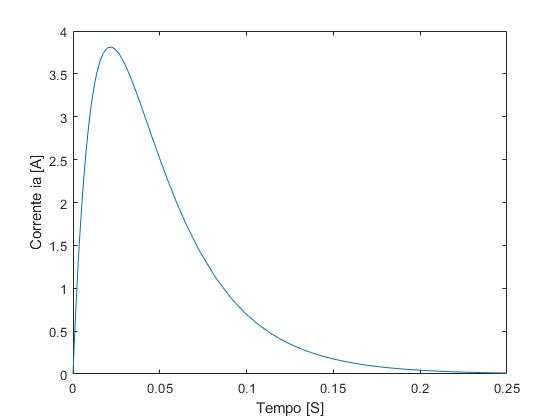
Il profilo di corrente è il seguente:
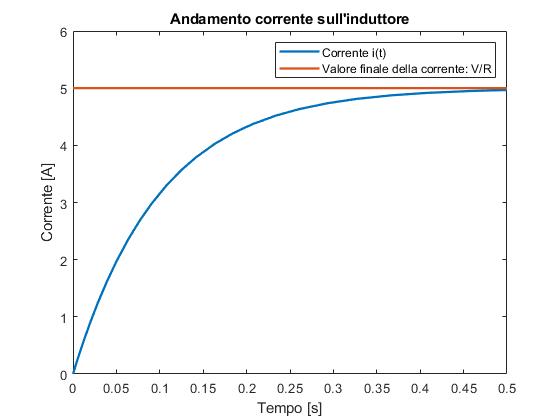
Il transitorio si estingue trascorso un tempo di circa cinque volte la costante di tempo 

Dal grafico si deduce che all’istante iniziale l’induttore si comporta come un circuito aperto, ovvero si ha corrente nulla. Questo si spiega dicendo che “si oppone alle variazioni di flusso” e quindi alle variazioni di corrente. Una volta a regime il flusso di corrente verrà mantenuto costante pari al valore massimo: la tensione (media, che in questo caso corrisponde alla tensione totale essendo in continua) ai suoi capi sarà nulla.
Alimentando con una tensione sinusoidale si osserverà quanto detto in precedenza, ovvero che la corrente è in ritardo sulla tensione. Essendo presente una resistenza in serie lo sfasamento non sarà esattamente di 90° elettrici ma potrà essere calcolato grazie ai “fasori” (dagli argomenti delle grandezze fasoriali) una volta estinto in transitorio.
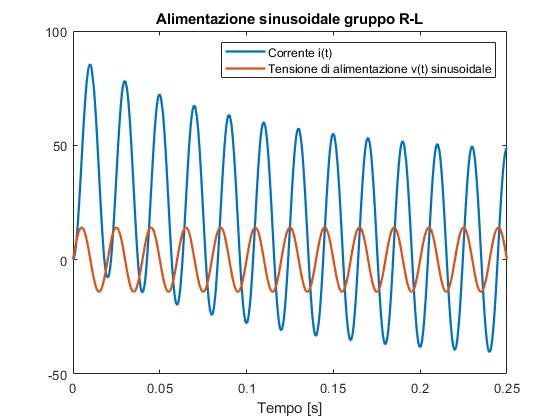
Nella fase transitoria, è presente una componente unidirezionale della corrente: il generatore fornisce la “potenza magnetizzante” necessaria a magnetizzare l’induttore.
Condensatore C

La tensione ai capi del condensatore è proporzionale alla carica in esso accumulata. La corrente non “attraversa” fisicamente il condensatore, che per natura è costituito da due armature di materiale conduttore tra le quali è interposto del “dielettrico” (isolante). Si avrà dunque una “corrente di spostamento”, ovvero dovuta allo spostamento delle cariche causato dall’azione del campo elettrico esterno (es. generatore di tensione). La cariche inizieranno a spostarsi, si accumuleranno e quindi salirà la tensione: la corrente è in anticipo rispetto alla tensione. A regime si osseerverà un anticipo di 90° elettrici.
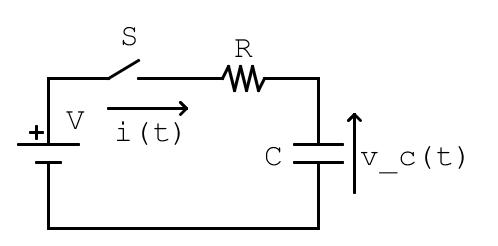
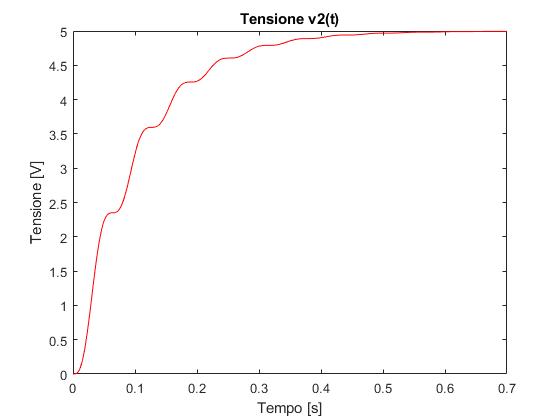
Il sistema da risolvere è:

La soluzione è:



Da cui si può calcolare la corrente grazie alla legge di Ohm:

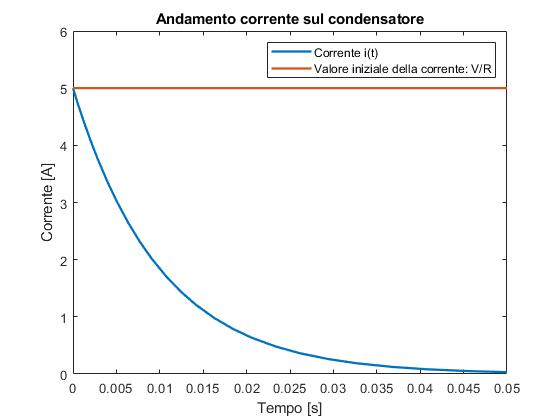
All’istante iniziale il condensatore è scarico (per snellire la trattazione) e quindi la tensione ai suoi capi è nulla. La differenza di potenziale sulla resistenza, la “driving force” è massima. La corrente sarà quindi massima. In seguito il condensatore si caricherà è la tensione ai suoi capi crescerà: raggiungerà il valore della tensione di alimentazione e la differenza di potenziale sulla rssistenza sarà nulla, di conseguenza lo sarà anche la corrente.
Sulla resistenza l’energia viene convertita in energia Termica per “effetto Joule”, Sull’induttanza in energia magnetica e sul condensatore in energia potenziale. La conversione tra energia elettrica in energia meccanica (e viceversa) passa attraverso il campo magnetico: grazie ai campi magnetici è possibile la generazione di forze elettrodinamiche (dall’interazione tra campi magnetici e correnti) che mettono in movimento un dispositivo (es. rotore di un motore elettrico).
Equazioni differenziali
Si deve quindi risolvere un “equazione differenziale “. Matlab mette a sisposizione la funzione “ODE” che consente di risolvere tali equazioni. Un generico sistema di equazioni differenziali può essere scritto come segue:




Matlab consente la risoluzione in maniera piuttosto semplice, la parte complicata sta nella scrittura della matrice A e del vettore b:
M = [… … … ; … … …];
K = [… … … ; … … …];
b = @(t) [… ; … ;… ];
t_span = [t_in t_fin]; %finestra temporale
x0 = [x0_1 x0_2 …]; %condizioni iniziali
Una volta inseriti i parametri le istruzioni utili allo scopo prefissato sono le seguenti:
options=odeset('Mass',M,'MassSingular','yes','RelTol',1e-4,'InitialStep',1e-4);
[t,x]=ode23t(@(t,x)(b(t)-K*x),t_Span,x0,options); %funzione ode23
Nella matrice “x” si avranno i valori nel tempo delle variabili di stato, mentre il vettore “t” conterrà il tempo.
Circuito generico
Un esempio aiuterà a comprendere la procedura da utilizzare.
Si prenda ad esempio il seguente circuito.
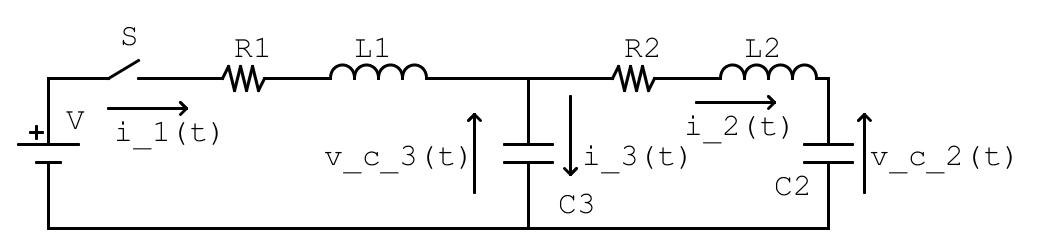
NOTA: Si tenga presente che i versi scelti per il calcolo non sono arbitrari e devono rispettare le convenzioni adottate.
Le variabili di stato (V.D.S.) in esame sono le correnti sugli induttori e le tensioni ai capi dei condensatori. Bisogna dunque scrivere quattro equazioni.
Il set di equazioni risulta essere:

condizioni iniziali:

Riscrivendo il sistema in termini matriciali (da fornire poi alla funzione ODE):
![\begin {bmatrix} -L1 & 0 &0 & 0 \\[6pt] 0 &-L2 & 0& 0 \\[6pt] 0 & 0 &-C2 & 0 \\[6pt] 0 & 0 &0 & -C3 \end{bmatrix} \frac{d}{dt} \begin {bmatrix} i1\\[6pt] i2\\[6pt] vc2\\[6pt] vc3 \end{bmatrix} + \ \begin {bmatrix} -R1 & 0 &0 &-1 \\[6pt] 0 &-R2 & -1& 0 \\[6pt] 0 & 1 &-C2 & 0 \\[6pt] 0 & -1 &0 &-C3 \end{bmatrix} \begin {bmatrix} i1\\[6pt] i2\\[6pt] vc2\\[6pt] vc3 \end{bmatrix} + \begin {bmatrix} V\\[6pt] 0\\[6pt] 0\\[6pt] 0 \end{bmatrix} = 0](https://s0.wp.com/latex.php?latex=%5Cbegin++%7Bbmatrix%7D+++-L1++%26+0+%260+%26+0+%5C%5C%5B6pt%5D++0+++%26-L2+%26+0%26+0+%5C%5C%5B6pt%5D++++0+++%26+0+%26-C2+%26+0+%5C%5C%5B6pt%5D+0++%26+0+%260++%26+-C3+++++++%5Cend%7Bbmatrix%7D++%5Cfrac%7Bd%7D%7Bdt%7D+%5Cbegin++%7Bbmatrix%7D++++i1%5C%5C%5B6pt%5D+++i2%5C%5C%5B6pt%5D+vc2%5C%5C%5B6pt%5D++++vc3++++++++++%5Cend%7Bbmatrix%7D++%2B+%5C+%5Cbegin++%7Bbmatrix%7D+++-R1++%26+0+%260+%26-1+%5C%5C%5B6pt%5D++0+++%26-R2+%26+-1%26+0+%5C%5C%5B6pt%5D++++0+++%26+1+%26-C2+%26+0+%5C%5C%5B6pt%5D+0++%26+-1++%260++%26-C3++++++%5Cend%7Bbmatrix%7D++%5Cbegin++%7Bbmatrix%7D++++i1%5C%5C%5B6pt%5D+++i2%5C%5C%5B6pt%5D+++vc2%5C%5C%5B6pt%5D++++vc3++++++++++%5Cend%7Bbmatrix%7D+++%2B++%5Cbegin++%7Bbmatrix%7D++++V%5C%5C%5B6pt%5D+++0%5C%5C%5B6pt%5D+0%5C%5C%5B6pt%5D+0++++%5Cend%7Bbmatrix%7D++%3D+0+&bg=ffffff&fg=424242&s=0&c=20201002)
![\begin {bmatrix} M \end{bmatrix} = \begin {bmatrix} -L1 & 0 &0 & 0 \\[6pt] 0 &-L2 & 0& 0 \\[6pt] 0 & 0 &-C2 & 0 \\[6pt] 0 & 0 &0 & -C3 \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5Cbegin++%7Bbmatrix%7D+++M++++++++%5Cend%7Bbmatrix%7D+++%3D+%5Cbegin++%7Bbmatrix%7D+++-L1++%26+0+%260+%26+0+%5C%5C%5B6pt%5D++0+++%26-L2++%26+0%26+0+%5C%5C%5B6pt%5D++++0+++%26+0+%26-C2+%26+0+%5C%5C%5B6pt%5D+0++%26+0++%260++%26+-C3+++++++%5Cend%7Bbmatrix%7D++&bg=ffffff&fg=424242&s=0&c=20201002)
![\begin {bmatrix} K \end{bmatrix} = \begin {bmatrix} -R1 & 0 &0 &-1 \\[6pt] 0 &-R2 & -1& 0 \\[6pt] 0 & 1 &-C2 & 0 \\[6pt] 0 & -1 &0 & -C3 \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5Cbegin++%7Bbmatrix%7D+++K+++++++%5Cend%7Bbmatrix%7D+++%3D++%5Cbegin++%7Bbmatrix%7D+++-R1++%26+0+%260+%26-1+%5C%5C%5B6pt%5D++0+++%26-R2++%26+-1%26+0+%5C%5C%5B6pt%5D++++0+++%26+1+%26-C2+%26+0+%5C%5C%5B6pt%5D+0++%26++-1++%260++%26+-C3++++++%5Cend%7Bbmatrix%7D+++++&bg=ffffff&fg=424242&s=0&c=20201002)
![\begin {bmatrix} b \end{bmatrix} = \begin {bmatrix} V\\[6pt] 0\\[6pt] 0\\[6pt] 0 \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5Cbegin++%7Bbmatrix%7D+++b++++++%5Cend%7Bbmatrix%7D+++%3D++%5Cbegin++%7Bbmatrix%7D++++V%5C%5C%5B6pt%5D+++0%5C%5C%5B6pt%5D+0%5C%5C%5B6pt%5D+0++++%5Cend%7Bbmatrix%7D++++&bg=ffffff&fg=424242&s=0&c=20201002)
Da notare come l’alimentazione possa essere qualsiasi funzione del tempo piuttosto che costante come in questo caso: “b” può essere funzione del tempo.
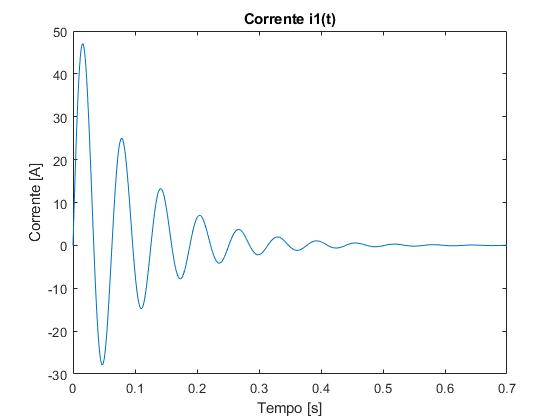
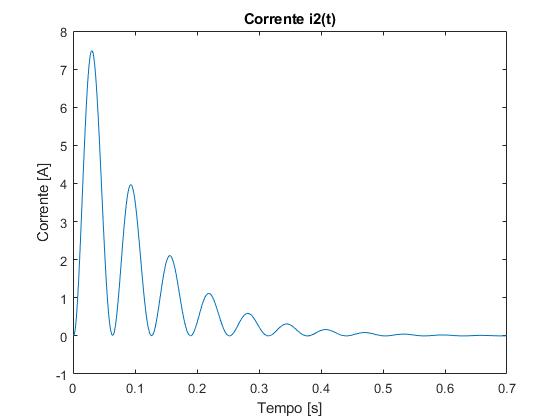
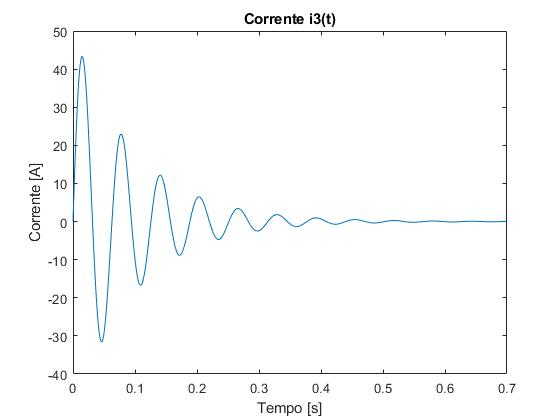
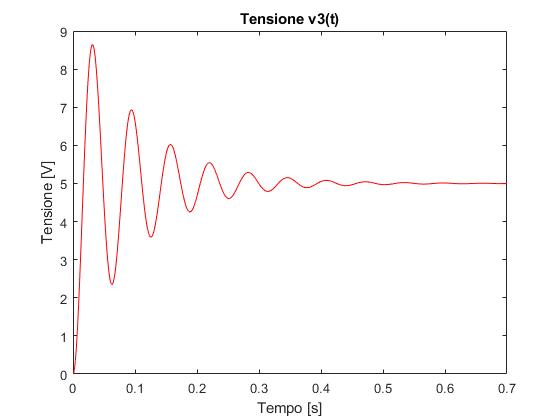
Aseguire i risultati della simulazione:
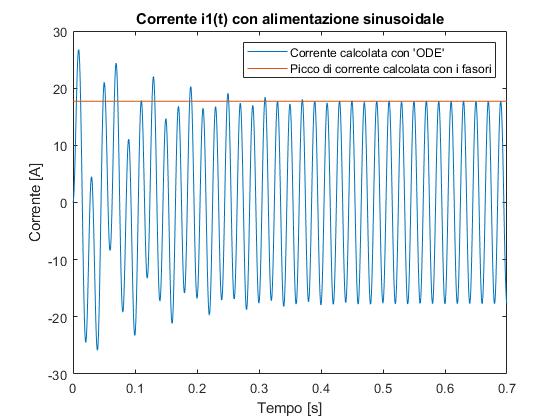
Per avere riscontri sulla bontà del metodo proposto, è possibile calcolare (una volta a regime) il valore di picco della corrente in caso di alimentazione sinusoidale: calcolo fasoriale.
La corrente di ingresso è i1(t), L’impedenza vista dal generatore è banalmente calcolabile:




Svolgendo i conti inserendo dei dati numerici si osserverà coerenza con i risultati precedentemente trovati.
Notare l’errore commesso nella fase iniziale dell’evoluzione temporale.
Matteo Gentileschi


 .
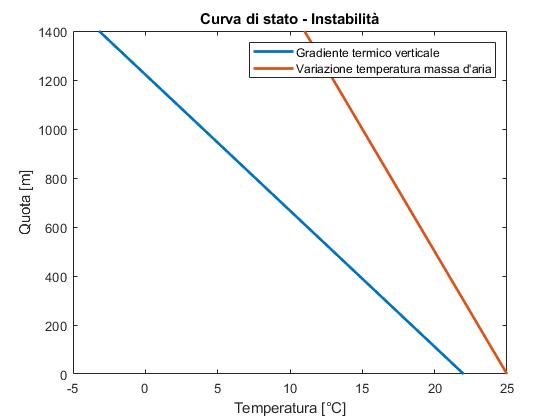
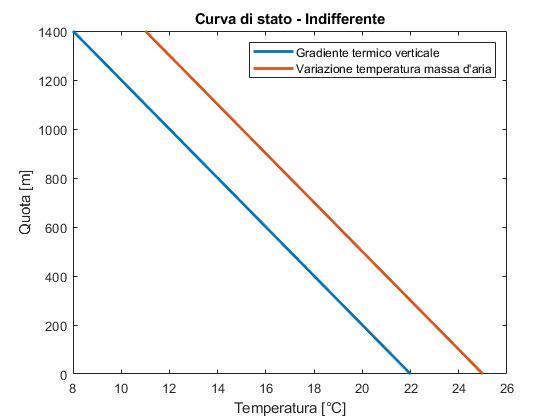
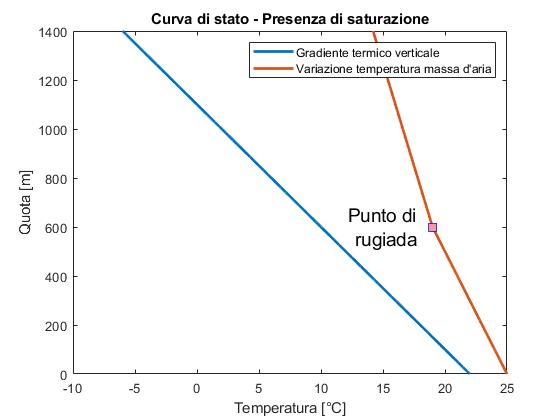
.  , ovvero come varia la temperatura al variare dell’altezza, costruito previo misurazioni condotte nella zona in esame. Il grafico nel quale viene riportato il gradiente termico verticale viene detto “curva di stato”.
, ovvero come varia la temperatura al variare dell’altezza, costruito previo misurazioni condotte nella zona in esame. Il grafico nel quale viene riportato il gradiente termico verticale viene detto “curva di stato”. 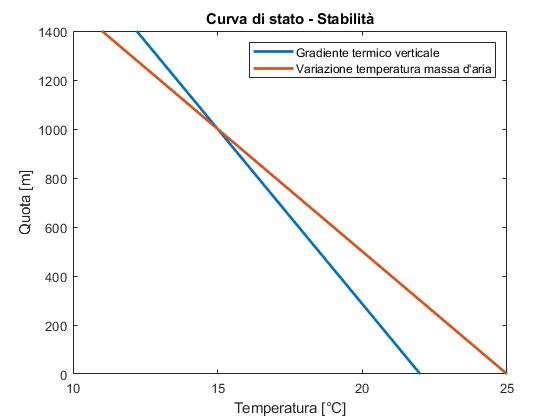

 e costante di velocità
e costante di velocità  e la copia motrice
e la copia motrice  dal prodotto tra corrente di armatura
dal prodotto tra corrente di armatura  e costente di coppia
e costente di coppia 


 , rappresentante la coppia dinamica (differenza tra coppia motrice
, rappresentante la coppia dinamica (differenza tra coppia motrice  copia resistente
copia resistente  ) è la seguente:
) è la seguente:
 e costante di coppia
e costante di coppia  .
.  e
e 

 e la corrente di armatura
e la corrente di armatura 


 = termini noti (forzanti)
= termini noti (forzanti)![\frac{d}{dt} \begin {bmatrix} i _{a } \\ \omega _{r } \end{bmatrix} = \begin {bmatrix} \frac{-R _{a } }{L _{a } } &\frac{-K _{e } }{L _{a } }\\[6pt] \frac{K _{t } }{J _{eq } } &0 \end{bmatrix} * \begin {bmatrix} i _{a } \\ \omega _{r } \end{bmatrix} + \begin {bmatrix} \frac{V _{a } }{L _{a } } \\[6pt] \frac{-C _{r } }{J _{eq } } \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5Cfrac%7Bd%7D%7Bdt%7D++%5Cbegin+%7Bbmatrix%7D+i+_%7Ba+%7D++%5C%5C+%5Comega++_%7Br+%7D++%5Cend%7Bbmatrix%7D+%3D+%5Cbegin++%7Bbmatrix%7D+++%5Cfrac%7B-R+_%7Ba+%7D+%7D%7BL+_%7Ba+%7D+%7D+++%26%5Cfrac%7B-K+_%7Be+%7D+%7D%7BL+_%7Ba+%7D+%7D%5C%5C%5B6pt%5D+++%5Cfrac%7BK+_%7Bt+%7D+%7D%7BJ+_%7Beq+%7D+%7D++++%260++++%5Cend%7Bbmatrix%7D+%2A+%5Cbegin++%7Bbmatrix%7D+i+_%7Ba+%7D++%5C%5C+%5Comega++_%7Br+%7D+++++%5Cend%7Bbmatrix%7D++%2B+%5Cbegin++%7Bbmatrix%7D++%5Cfrac%7BV+_%7Ba+%7D+%7D%7BL+_%7Ba+%7D+%7D+++%5C%5C%5B6pt%5D+++%5Cfrac%7B-C+_%7Br+%7D+%7D%7BJ+_%7Beq+%7D+%7D++%5Cend%7Bbmatrix%7D+++&bg=ffffff&fg=424242&s=0&c=20201002)
 e tensione di alimentazione
e tensione di alimentazione  , infatti, potrebbero variare nel tempo.
, infatti, potrebbero variare nel tempo. ) ed elettrica (
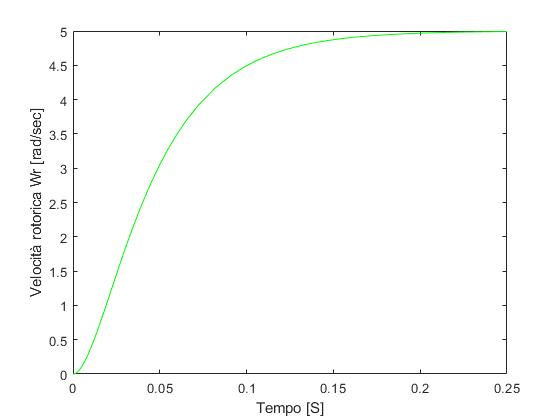
) ed elettrica ( ) . Dalla fisica, un qualsiasi transitorio può considerarsi esaurito trascorso un tempo pari a cinque volte la costante di tempo. In questo caso si considera un tempo pari a cinque volte (quattro volte
) . Dalla fisica, un qualsiasi transitorio può considerarsi esaurito trascorso un tempo pari a cinque volte la costante di tempo. In questo caso si considera un tempo pari a cinque volte (quattro volte 
 si avrà un valore di circa il 70% del valore a regime.
si avrà un valore di circa il 70% del valore a regime.  , ovvero (si ricorda che la matrice
, ovvero (si ricorda che la matrice  è la matrice identità):
è la matrice identità):
![det( \begin {bmatrix} \frac{-R _{a } }{L _{a } } &\frac{-K _{e } }{L _{e } }\\[6pt] \frac{K _{t} }{J _{eq } } &0 \end{bmatrix} - s \begin {bmatrix} 1 &0\\[6pt] 0 &1 \end{bmatrix}) = s^2 + \frac{R _{a } }{L _{a } } *s+ \frac{K _{e } *K _{t } }{J _{eq } * L _{a } } = s^2 + \frac{1}{ \tau _{e } } *s+ \frac{1}{ \tau _{m } * \tau _{e } } = 0](https://s0.wp.com/latex.php?latex=det%28++%5Cbegin++%7Bbmatrix%7D+++%5Cfrac%7B-R+_%7Ba+%7D+%7D%7BL+_%7Ba+%7D+%7D+++%26%5Cfrac%7B-K+_%7Be+%7D+%7D%7BL+_%7Be+%7D+%7D%5C%5C%5B6pt%5D+++%5Cfrac%7BK+_%7Bt%7D+%7D%7BJ+_%7Beq+%7D+%7D++++%260++++%5Cend%7Bbmatrix%7D++-+s+++%5Cbegin++%7Bbmatrix%7D+++1+++%260%5C%5C%5B6pt%5D++0++++%261++++%5Cend%7Bbmatrix%7D%29+%3D+s%5E2+%2B++%5Cfrac%7BR+_%7Ba+%7D+%7D%7BL+_%7Ba+%7D+%7D+%2As%2B++%5Cfrac%7BK+_%7Be+%7D++%2AK+_%7Bt+%7D+%7D%7BJ+_%7Beq+%7D++%2A+L+_%7Ba+%7D+%7D+++%3D+s%5E2+%2B++%5Cfrac%7B1%7D%7B+%5Ctau++_%7Be+%7D+%7D+%2As%2B++%5Cfrac%7B1%7D%7B+%5Ctau++_%7Bm+%7D++%2A++%5Ctau++_%7Be+%7D++%7D++++%3D+0&bg=ffffff&fg=424242&s=0&c=20201002)




 . Il diagramma a blocchi (funzione di trasferimento nel dominio di Laplace) risulta essere il seguente (anello di velocità):
. Il diagramma a blocchi (funzione di trasferimento nel dominio di Laplace) risulta essere il seguente (anello di velocità):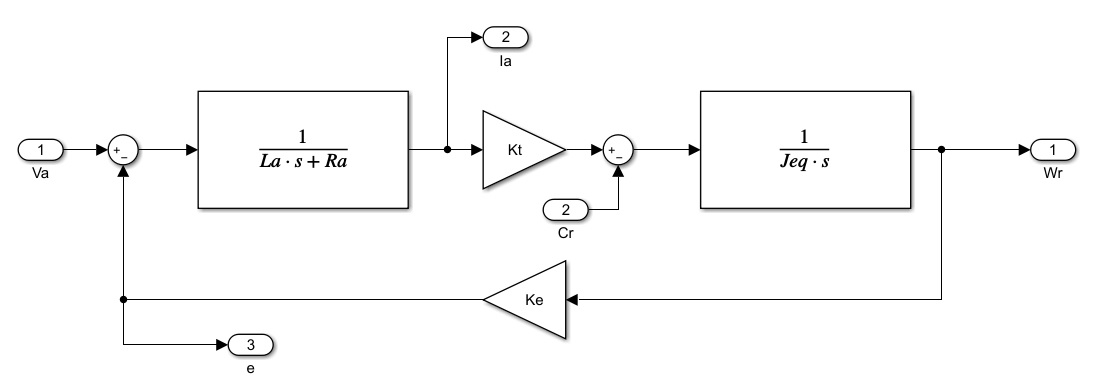


 ) la tensione di armatura è pari alla f.e.m. indotta : la forzante della corrente (sul gruppo RL) è nulla.
) la tensione di armatura è pari alla f.e.m. indotta : la forzante della corrente (sul gruppo RL) è nulla.  ) sarà tale da bilanciare la coppia resistente (ri rammenta che la coppia e la corrente sono legate dalla costante di copia
) sarà tale da bilanciare la coppia resistente (ri rammenta che la coppia e la corrente sono legate dalla costante di copia 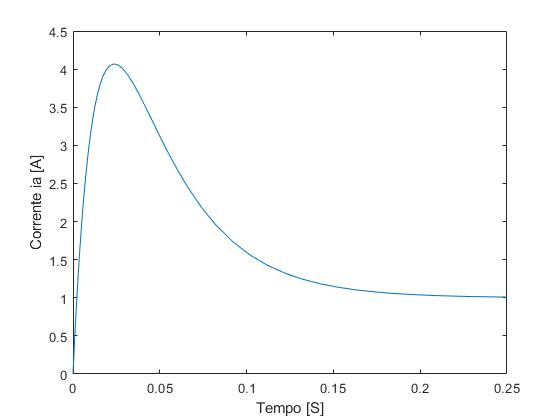
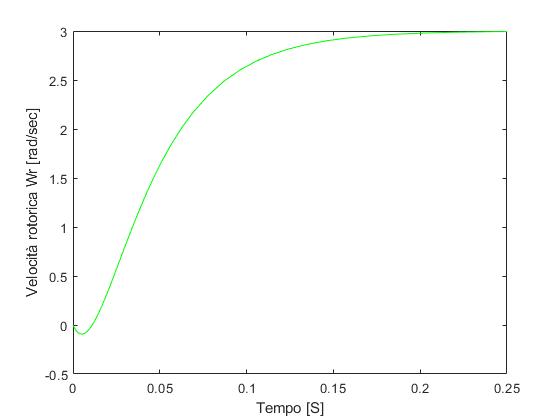
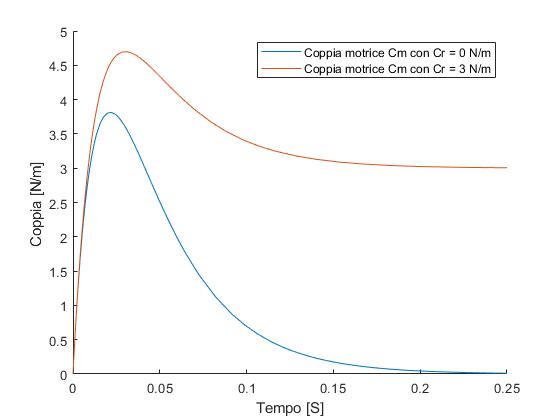
 ) positiva. Data la convenzione di segno utilizzata, sarà tale da far girare il ritore nel verso desiderato. Eseguendo uno “zoom” nel tratto in questione (ed imponendo una coppia resistente elevata per evidenziare tale aspetto) si ottiene il seguente risultato:
) positiva. Data la convenzione di segno utilizzata, sarà tale da far girare il ritore nel verso desiderato. Eseguendo uno “zoom” nel tratto in questione (ed imponendo una coppia resistente elevata per evidenziare tale aspetto) si ottiene il seguente risultato: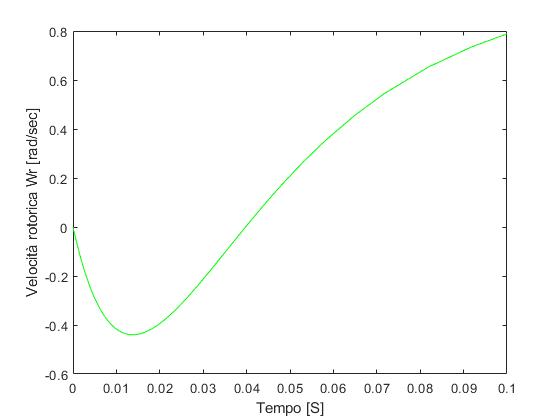
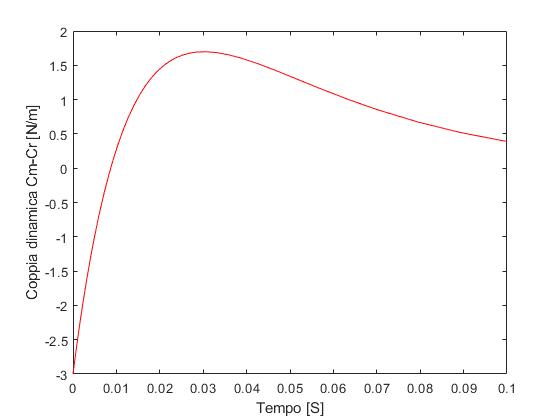
 . Imponendo una coppia resistente, a titolo di esempio, pari a
. Imponendo una coppia resistente, a titolo di esempio, pari a  , rammentando che la corrente iniziale è nulla (e quindi anche la coppia motrice) si avrà, all’istante zero, copia dinamica pari a Plottando tale equazione si a
, rammentando che la corrente iniziale è nulla (e quindi anche la coppia motrice) si avrà, all’istante zero, copia dinamica pari a Plottando tale equazione si a  :
: 
 (gradino di coppia all’istante zero) la corrente a regime sarà tale da bilanciare il sistema.
(gradino di coppia all’istante zero) la corrente a regime sarà tale da bilanciare il sistema.