Un motore DC (come ogni macchina elettrica) è descrivibile per mezzo di equazioni differenziali. Si tratta di equazioni piuttosto note la cui soluzione può essere affidata a software quali Matlab o, ad esempio, Excel. Nel primo caso la risoluzione sarà relativamente più semplice (in termini di economia di tempo). In questa sede , prendendo in esame dati “verosimili”, tracceremo le caratteristiche di tensione, velocità e corrente di un motore DC a magneti permanenti (quindi non analizzando gli effetti di eventuali deflussaggi) alimentato da tensione continua (batteria ideale).
NOTA : Trattandosi si un “articolo di prova” verranno trascurate le perdite nel ferro, gli attriti dei cuscinetti, le perdite per “scintillio” (si tratta di un motore a spazzole) i termini mozionali ecc. Non verranno trattati i metodi per la risoluzione delle equazioni differenziali. Pertanto è da considerarsi come introduttivo.
Partiamo dal circuito equivalente:
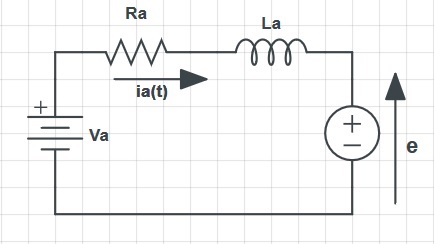
Scrivendo l’equazione della maglia (equazione elettrica):

Rammentando che “e”, la forza elettromotrice indotta, è data dal prodotto tra velocità rotorica 






Notere che si tratta di funzioni del tempo, con “t” tra parentesi: siamo in dinamica, il modello a regime non sarebbe sufficiente a descrivere il comportamento durante l’avviamento o la presa di carico. Per semplificare la notazione, di seguito si eviterà di specificarlo ma è bene tenerlo a mente.
L’equazione meccanica, noto il momento d’inerzia equivalente (dell’albero) 



La coppia motrice 

NOTA: In prima approssimazione 
Il set di equazioni sarà quindi:


La velocità del rotore 

Dove:



Quindi:
![\frac{d}{dt} \begin {bmatrix} i _{a } \\ \omega _{r } \end{bmatrix} = \begin {bmatrix} \frac{-R _{a } }{L _{a } } &\frac{-K _{e } }{L _{a } }\\[6pt] \frac{K _{t } }{J _{eq } } &0 \end{bmatrix} * \begin {bmatrix} i _{a } \\ \omega _{r } \end{bmatrix} + \begin {bmatrix} \frac{V _{a } }{L _{a } } \\[6pt] \frac{-C _{r } }{J _{eq } } \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5Cfrac%7Bd%7D%7Bdt%7D++%5Cbegin+%7Bbmatrix%7D+i+_%7Ba+%7D++%5C%5C+%5Comega++_%7Br+%7D++%5Cend%7Bbmatrix%7D+%3D+%5Cbegin++%7Bbmatrix%7D+++%5Cfrac%7B-R+_%7Ba+%7D+%7D%7BL+_%7Ba+%7D+%7D+++%26%5Cfrac%7B-K+_%7Be+%7D+%7D%7BL+_%7Ba+%7D+%7D%5C%5C%5B6pt%5D+++%5Cfrac%7BK+_%7Bt+%7D+%7D%7BJ+_%7Beq+%7D+%7D++++%260++++%5Cend%7Bbmatrix%7D+%2A+%5Cbegin++%7Bbmatrix%7D+i+_%7Ba+%7D++%5C%5C+%5Comega++_%7Br+%7D+++++%5Cend%7Bbmatrix%7D++%2B+%5Cbegin++%7Bbmatrix%7D++%5Cfrac%7BV+_%7Ba+%7D+%7D%7BL+_%7Ba+%7D+%7D+++%5C%5C%5B6pt%5D+++%5Cfrac%7B-C+_%7Br+%7D+%7D%7BJ+_%7Beq+%7D+%7D++%5Cend%7Bbmatrix%7D+++&bg=ffffff&fg=424242&s=0&c=20201002)
Per la risoluzione di tale sistema, si userà la funzione “ode23t” di Matlab che consente di risolvere le equazioni differenziali ordinarie di “ordine basso” (https://it.mathworks.com/help/matlab/ref/ode23.html). Segue il codice dello script:
Ra =1; %[ohm]
La = 0.01; %[H]
Ke = 1; %[V/rad]
Kt = 1; %[Nm/A]
Jeq = 0.05; %[Kgm^2]
Tau_e = La/Ra ; %costante di tempo elettrica
Tau_m = RaJeq/(Kt*Ke);%costante di tempo meccanica
A = [-Ra/La -Ke/La; Kt/Jeq 0]; %Matrice “A”
Va = @(t) 5;
Cr = @(t) 0;%[N/m]
b = @(t) [Va(t)/La; -Cr(t)/Jeq];
x0 = [0;0];
t_Span = [0 5*Tau_m];
[t,x]=ode23t(@(t,x)(A*x+b(t)),t_Span,x0); %funzione ode23
NOTA: la matrice [b] è funzione del tempo: coppia resistente 

Il tempo di simulazione è cacolato tenendo presente le costanti di tempo meccanica (



NOTA: trascorso un tempo pari alla costente di tempo 
Scrivendo il polinimio caratteristico della matrice 


![det( \begin {bmatrix} \frac{-R _{a } }{L _{a } } &\frac{-K _{e } }{L _{e } }\\[6pt] \frac{K _{t} }{J _{eq } } &0 \end{bmatrix} - s \begin {bmatrix} 1 &0\\[6pt] 0 &1 \end{bmatrix}) = s^2 + \frac{R _{a } }{L _{a } } *s+ \frac{K _{e } *K _{t } }{J _{eq } * L _{a } } = s^2 + \frac{1}{ \tau _{e } } *s+ \frac{1}{ \tau _{m } * \tau _{e } } = 0](https://s0.wp.com/latex.php?latex=det%28++%5Cbegin++%7Bbmatrix%7D+++%5Cfrac%7B-R+_%7Ba+%7D+%7D%7BL+_%7Ba+%7D+%7D+++%26%5Cfrac%7B-K+_%7Be+%7D+%7D%7BL+_%7Be+%7D+%7D%5C%5C%5B6pt%5D+++%5Cfrac%7BK+_%7Bt%7D+%7D%7BJ+_%7Beq+%7D+%7D++++%260++++%5Cend%7Bbmatrix%7D++-+s+++%5Cbegin++%7Bbmatrix%7D+++1+++%260%5C%5C%5B6pt%5D++0++++%261++++%5Cend%7Bbmatrix%7D%29+%3D+s%5E2+%2B++%5Cfrac%7BR+_%7Ba+%7D+%7D%7BL+_%7Ba+%7D+%7D+%2As%2B++%5Cfrac%7BK+_%7Be+%7D++%2AK+_%7Bt+%7D+%7D%7BJ+_%7Beq+%7D++%2A+L+_%7Ba+%7D+%7D+++%3D+s%5E2+%2B++%5Cfrac%7B1%7D%7B+%5Ctau++_%7Be+%7D+%7D+%2As%2B++%5Cfrac%7B1%7D%7B+%5Ctau++_%7Bm+%7D++%2A++%5Ctau++_%7Be+%7D++%7D++++%3D+0&bg=ffffff&fg=424242&s=0&c=20201002)
Quindi, le costanti di tempo risultano essere:


Per determinare se il sistema è oscillante o meno è utile ragioanare sui poli. Se i poli sono reali il sistema non oscillerà. Viceversa, in caso di poli complessi e coniugati il sistema oscillerà. Trattandosi di un equazione di secondo grado, la formula per trovare le soluzioni (due soluzioni) è la seguente:

I poli sono reali se l’argomento della radice è positivo. In termini matematici se è verificata la seguente condizione:

Lo smorzamento è legato alla resistenza di armatura 
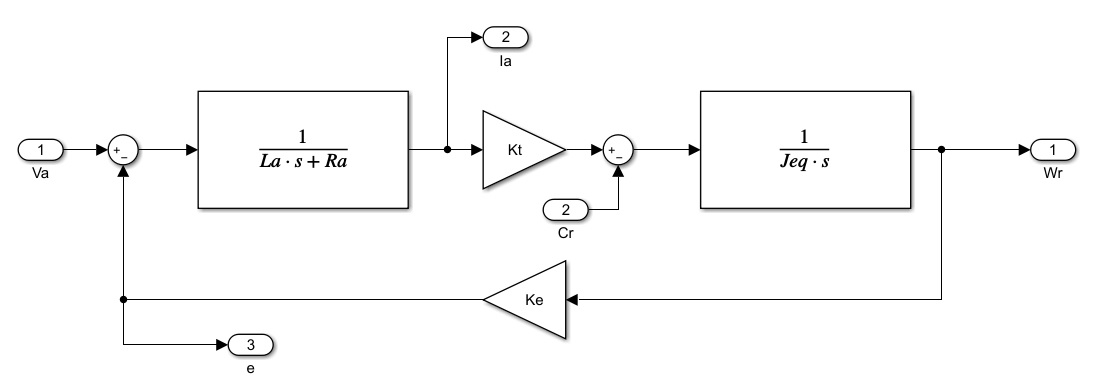
Che rappresenta l’equazione (funzione di trasferimento) :


Lanciando la simulazione (valori dei parametri nel codice Matlab) si ha il seguente profilo di corrente.
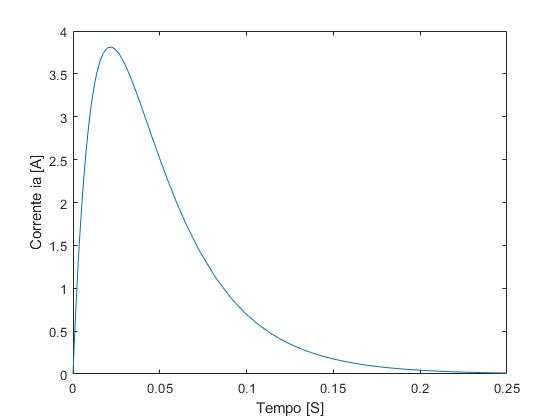
Come prima cosa osserviamo che il sistema non oscilla. La massima corrente teorica la si ha all’istante iniziale. in quell’istante infatti La f.e.m. indotta è nulla, se non vi fosse l’indutanza il picco di corrente lo si avrebbe all’origine. Il modello meno approssimato però presenta un induttanza: per loro natura l’induttanza “si oppongono” alle variazioni di corrente e quindi non osserviamo una variaziono e gradino. Essendo la coppia resistente nulla, una volta arrivato a regime (
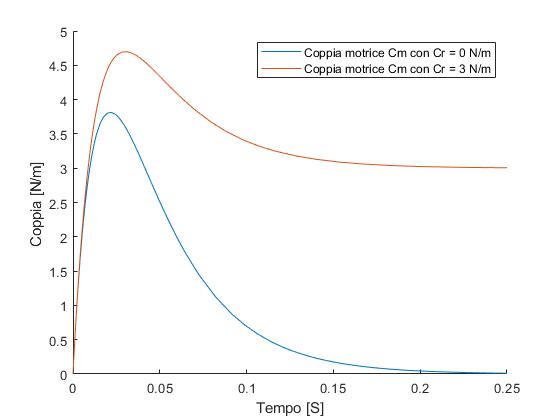
Se invece la coppia resistente non è nulla, a regime la corrente a regime (e quindi la coppia motrice 
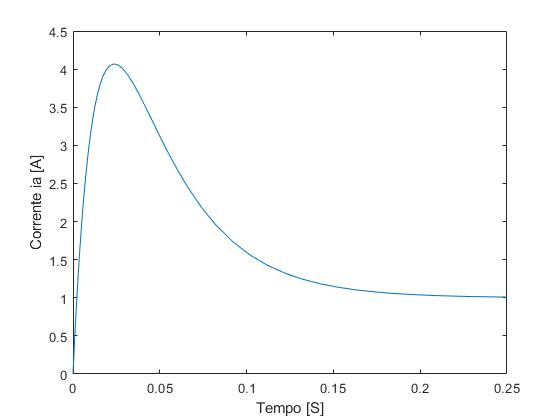
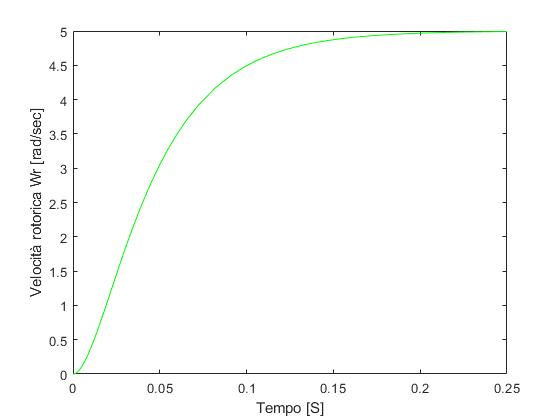
Notare che la corrente “di spunto” (nelle fasi iniziali del transitorio) è maggiore rispetto al caso in cui l’albero non era calettato ad alcuno carico. Per quanto riguarda la velocità nonvece, non vi è alcuna differenza.
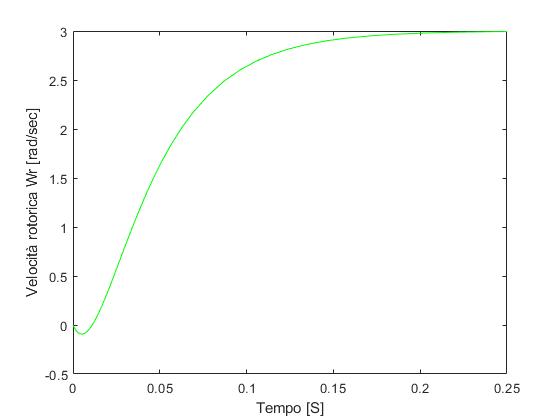
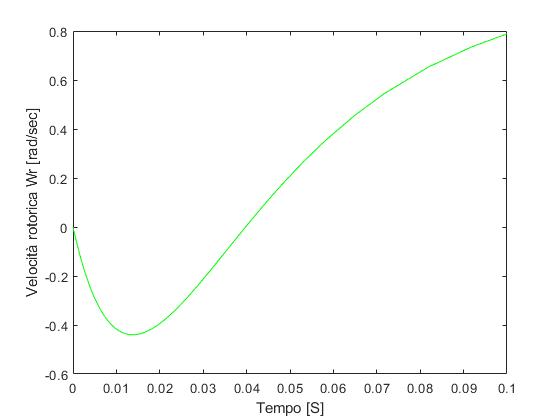
Osservando il grafico della velocità in presenza di coppia resistente si osserva che inizialmente essa diventa negativa. Le condizioni iniziali, nella fase di risoluzione delle equazioni differenziali (funzione ODE di Matlab) sono state imposte correttamente (x0 = [0;0];). Il fatto che giri nel verso opposto, nei primi istanti, è dovuto al fatto che la coppia resistente 
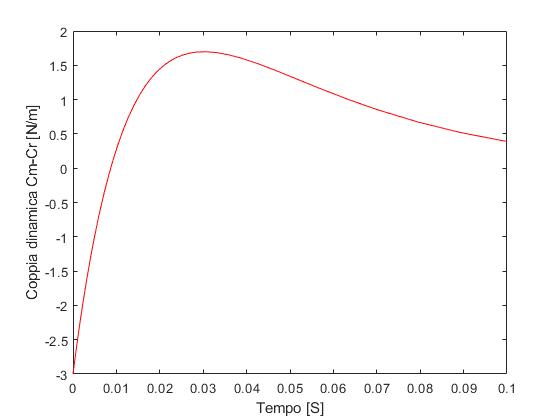
Precisazioni sul segno della coppia: La coppia dinamica è stata definita come 


Quindi, in assenza di copia resistente la corrente di armatura a regime sarà nulla. Se, invece, si applica una coppia resistente 
Se invece si hanno poli complessi e coniugati il sistema (come accennato) oscillerà. Lo smorzamento sarà, in questo caso rappresentato dalla resistenza di armatura
Spero che tale “ripasso” possa esser utile a qualcuno. Si rammenta, comunque, che tali aspetti sono “di prima approssimazione”: non si fa cenno ad alcuna filosofia di controllo, si “monta” la macchina e si “da tensione” misurandone le v.d.s.. Per uno studio più approfondito, si consiglia vivamente di far rifermineto a Libri o comunque ad articoli tecnici relativi alla “dinamica delle macchine”.
