Macchine elettriche e Linee sono “descritte” da modelli elettrici costituiti da tre bipoli “ideali”: Induttanza, resistenza e capacità. La resistenza rappresenta tutto ciò che è “attivo”, ovvero dove avviene la conversione energetica. Induttanza e condensatore, invece, rappresentano tutto ciò che “accumula” energia. Le grandezze “energetiche”, ovvero quelle associate allo stato energetico del sistema, sono Variabili di Stato (V.D.S). Dal momento che le V.D.S. non ammettono salti (principio di conservazione dell’energia), qualora si cercasse di far variare qualche parametro, il sistema risponderà con dei transitori (ovvero con una certa dinamica), che garantiscano la continuità delle stesse. Va tenuto quindi presente che non vi è alcuno modo di ignorare la dinamica di un sistema elettrico. La si può rendere veloce quanto si vuole (riesce….) ma il circuito elettrico non sarà mai svincolato dalle leggi della Fisica.
Circuito RL
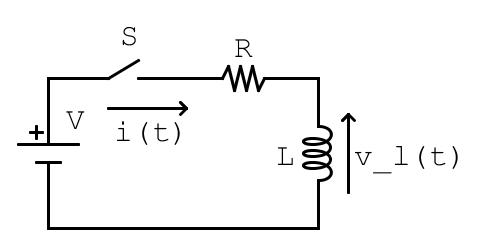
Dato un circuito RL, ad esempio, la variabile di stato è la corrente.
L’equazione costitutiva dell’induttanza è la seguente:

Le lettere in minuscolo sono funzioni del tempo.
Analiticamente si osserva facilmente che la corrente induttiva non può variare a gradino (essendo V.D.S.) : questo comporterebbe una derivata “virtualmente” tendente all’ infinito, portanto sarà la tensione stessa a tendere “virtualmente” all’ infinito (nella realtà ciò non avviene a causa della presenza di parametri quali capacità parassite ecc) . Una tensione “tendente” ad infinito si traduce in archi elettrici che consentono comunque il passaggio di corrente. L’arco elettrico, di fatto, è il fenomeno che garantisce la naturale continuità della corrente.
L’enegia immagazzinata dall’induttore, infatti, vale:

Se la corrente variasse “a gradino” varierebbe a gradino anche E: questo è incompatibile con la Fisica (l’apertura di un circuito induttivo è “incompatibile”).
Scrivendo l’equazione della suddetta maglia RL, si può esplicitare la variazione di corrente:
![V - Ri- L \frac{d i}{dt} = 0 \rightarrow \frac{d i}{dt} = \frac{1}{L}[V-Ri]](https://s0.wp.com/latex.php?latex=V+-+Ri-+L+%5Cfrac%7Bd+i%7D%7Bdt%7D+%3D+0+%5Crightarrow+%5Cfrac%7Bd+i%7D%7Bdt%7D+%3D+%5Cfrac%7B1%7D%7BL%7D%5BV-Ri%5D&bg=ffffff&fg=424242&s=0&c=20201002)
Ora, senza passare per la risoluzione analitica risolvendo l’equazione differenziale ed il classico problema di Cauchy, si può ricorrere al calcolo numerico.
Prima di fare ciò, è interessante notare come dalla suddetta equazione sia possibile ritrovare alcuni “concetti” fisici. Qualora l’inerzia del circuito, ovvero L, sia nulla, l’equazione presenterebbe una singolarità: La derivata di corrente “tenderebbe” ad infinito, ovvero si avrebbe un vero e proprio gradino di corrente. Si è già detto che questo, in un circuito induttivo, non è possibile. Il punto è che, se L fosse nulla, il circuito non sarebbe induttivo ma si tradurrebbe in un circuito resistivo (sola R). La corrente non sarebbe più variabile di stato e quindi sarebbero consentite variazioni in tempo zero.
Se si analizzasse, ad esempio, la soluzione analitica con ingresso di tensione a gradino (ovvero chiudendo l’interruttore S) :

Ove:

Si osserverebbe che l’assenza di inerzia porterebbe ad una costante di tempo nulla e quindi :

Qualora non vi fosse la resistenza R, l’equazione presenterebbe singolarità: La corrente tenderebbe, nel tempo, virtualmente ad infinito (in sostanza si tenderebbe ad un corto circuito).
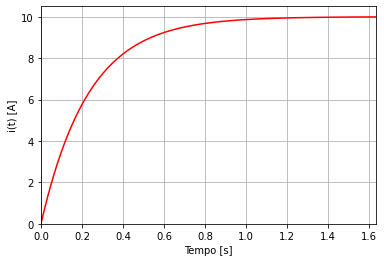
Scrivendo il modello della maglia in Python per poi risolverlo con il solver “odeint()”, si può facilmente verificare che si tratta di un transitorio del primo ordine:
import numpy as np
from scipy.integrate import odeint
import matplotlib.pyplot as plt
import math
R = 0.3 #[OHM]
L = 0.07 #[H]
def RL(i,t,e):
di_dt = (1/L)*(e-R*i)
return di_dt
n = 10000
t_max =2
t = np.linspace(0,t_max,n)
i0 = 0
e =3
i= odeint(RL,i0 ,t,args=(e,))
plt.plot(t,i, color ="red")
plt.xlabel('Tempo [s]')
plt.ylabel('i(t) [A]')
plt.axis([0,7*L/R, 0, 10.5])
plt.grid()
plt.show()
L’andamento della corrente (variabile di stato) in funzione del tempo è il seguente.
La tensione ai capi dell’induttore può essere ricavata risolvendo la maglia:

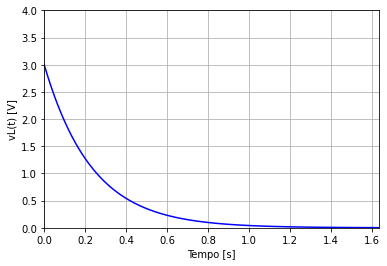
Notare che la tensione ai capi di L si annulla asintoticamente. Questo è coerente dal momento che, qualora non fosse così, la corrente crescerebbe ininterrottamente (la motivazione è già stata espletata).
La potenza fornita dal generatore viene in parte dissipata sulla resistenza, in parte viene trasformata in energia magnetica ed immmagazzinata sull’indottore L:
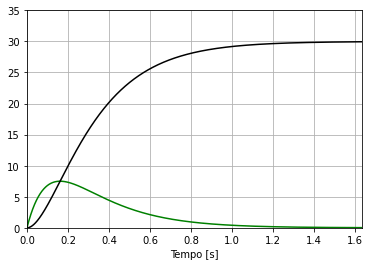
In nero la potenza dissipata sulla resistenza e in verde la potenza di magnetizzazione. L’area sottesa alle curve (per definizione) è l’energia.
Chiudendo un induttore carico (quindi sta scorrendo una corrente non nulla) su una resistenza si innescerebbe un’evoluzione libera, ovvero senza forzante (generatore).
Si osserva come al variare della resistenza si ha una variazione della costante di tempo (ovviamente): Più è alta la resistenza più velocemente viene dissipata l’energia (quindi il transitorio sarà più veloce). In sostanza, qualora la resistenza fosse nulla si avrebbe una costante di tempo tendente “virtualmente” ad infinito. Questo si traduce nel fatto che il transitorio non si estinguerebbe mai (l’energia non verrebbe dissipata):
Tracciando quindi l’andamento della corrente al crescere della resistenza si ottiene il seguente risultato:
Plottando, invece, l’andamento della potenza dissipata sulla resistenza, si osservano che l’energia dissipata (l’area sottesa alla potena) è la medesima ma la velocità con cui viene dissipata (che dipende dalla costante di tempo del sistema) varia:
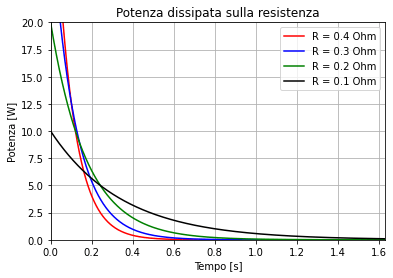
Per alti valori di R, l’energia viene dissipata più lentamente.
Per concludere questo ragionamento, il valore di resistenza R è associata alla dissipazione energetica, mentre il valore dell’induttanza L rappresenta porpio la capacità di immagazzinamento di energia.
Circuito RC
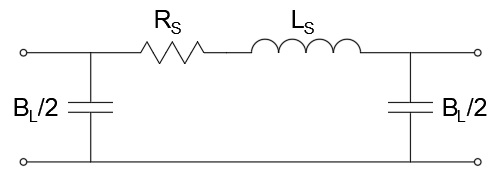
Per dualismo, si tenga in considerazione un circuito capacitivo RC:
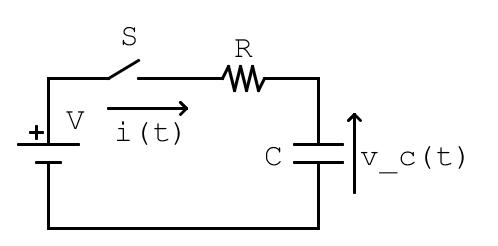
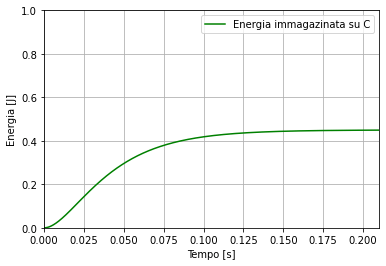
Lo stato energetico è associato alla tensione sul condensatore vc (che è v.d.s.). L’energia immagazzinata in un condensatore, infatti, vale:

Azzerando la resistenza, quando si chiude l’interruttore e la tensione vc non è pari alla tensione di alimentazione V, si avrebbe un corto circuito. Questo perchè la tensione su un condensatore è variabile di stato (e quindi non ammette variazioni a gradino). Questo è osservabile risolvendo l’equazione differenziale:
![V -R*i-v_c(t) = 0 \rightarrow V- RC \frac{d v_c}{dt} - v_c(t) = 0 \rightarrow \frac{d v_c}{dt} = \frac{1}{RC}[V-vc(t)]](https://s0.wp.com/latex.php?latex=V+-R%2Ai-v_c%28t%29+%3D+0+%5Crightarrow+V-+RC+%5Cfrac%7Bd+v_c%7D%7Bdt%7D+-+v_c%28t%29+%3D+0+%5Crightarrow+%5Cfrac%7Bd+v_c%7D%7Bdt%7D+%3D+%5Cfrac%7B1%7D%7BRC%7D%5BV-vc%28t%29%5D&bg=ffffff&fg=424242&s=0&c=20201002)
La soluzione analitica è :

Al tempo t = 0 si avrebbe:

La caduta sulla sulla resistenza è pari a (istante per istante):

All’istante iniziale tutta la tensione cade su R: qualora fosse assente si avrebbe un corto circuito per antonomasia (sostanzialmente la corrente tenderebbe, all’istante iniziale, virtualmente ad inifinito).
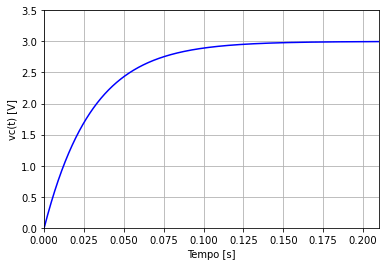
Il modello in Python:
import numpy as np
from scipy.integrate import odeint
import matplotlib.pyplot as plt
import math
R = 0.3 #[OHM]
C = 0.1 #[F]
def RC(vc,t,e):
dvc_dt = (1/(R*C))*(e-vc)
return dvc_dt
n = 10000
t_max =2
t = np.linspace(0,t_max,n)
e =3
vc0 = 0
vc= odeint(RC,vc0 ,t,args=(e,))
plt.plot(t,vc, color ="blue")
plt.xlabel('Tempo [s]')
plt.ylabel('vc(t) [V]')
plt.axis([0,7*R*C, 0,3.5])
plt.grid()
plt.show()
Da cui:
Osservazioni
Si può quindi affermare che:
- Se all’instante della chiusura di un interruttore su un condensatore la tensione su di esso non è pari alla tensione di alimentazione, si ottiene un corto circuito;
- Se all’istante di apertura di un interruttore in un ramo induttivo non si consente il ricircolo della corrente ma si “pretenderebbe” una discontinuità, si ottengono delle sovratensioni tali da danneggiare gli isolanti tramite Archi elettrici.
Circuito RLC
In un circuito RLC si instaura un transitorio del seondo ordine, ovvero si hanno due variabili di stato: la corrente su L e la tensione ai capi di C.
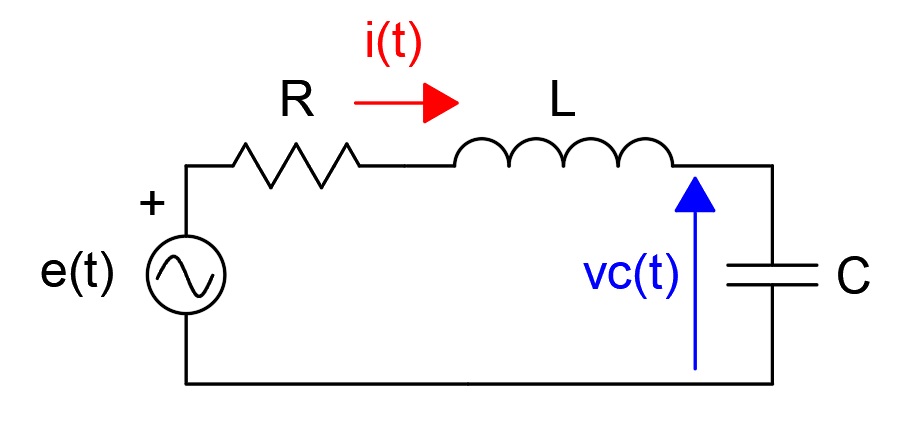
In Python, una funzione che descrive il suddetto circuito è il seguente:
def RLC(v_d_s,t,e):
i = v_d_s[0]
vc = v_d_s[1]
di_dt = (1/L)*(e-R*i-vc)
dvc_dt = (1/C)*i
v_d_s = [di_dt, dvc_dt ]
return v_d_s
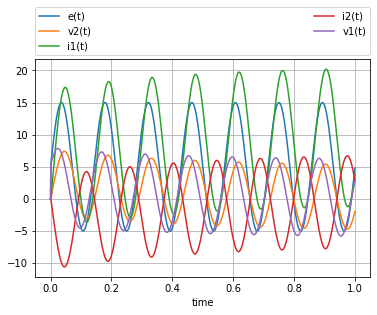
Applicando un gradino di tensione, le due variabili di stato (partendo da una condizione di energia nulla, ovvero sia tensione che corrente iniziale sono nulle) hanno il seguente andamento:
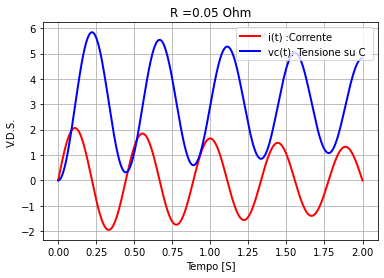
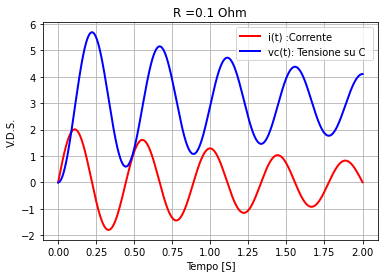
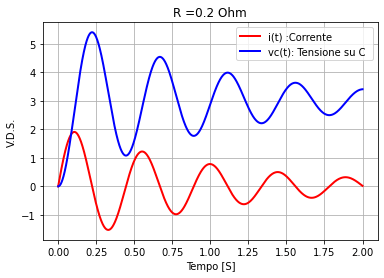
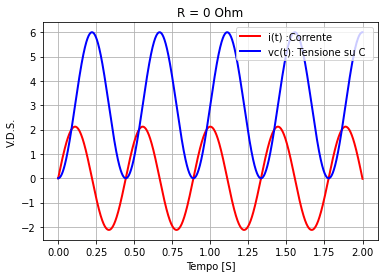
Quindi, all’aumentare del valore della resistenza, si ha un aumento dello smorzamento (c.v.d.). Il caso limite lo si avrebbe con resistenza nulla, ovvero il transitorio non si estinguerebbe mai:
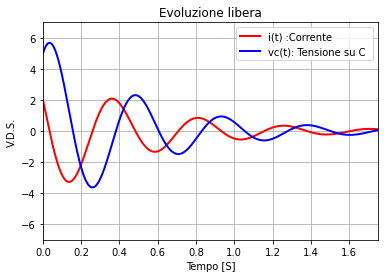
Passivando il generatore di tensione e indicando quali sono le condizioni iniziali (corrente sull’induttore e tensione sul condensatore all’istante zero), si ottiene l’evoluzione libera:
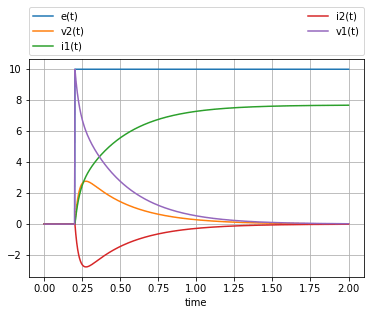
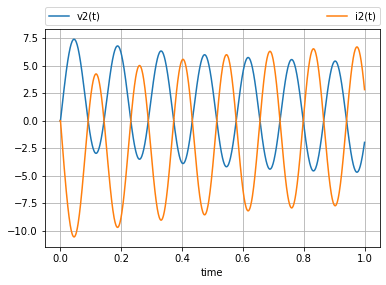
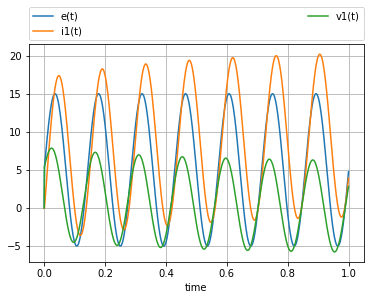
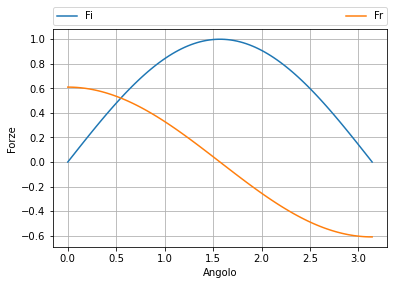
Qualora il circuito fosse alimentato in alternata, si oserverebbe un rimbalzo di energia tra le due reattanza, oltre che ad una dissipazione attiva sulla resistenza. Si ha una perfetta anaolgia con il Pendolo (meccanica classica):
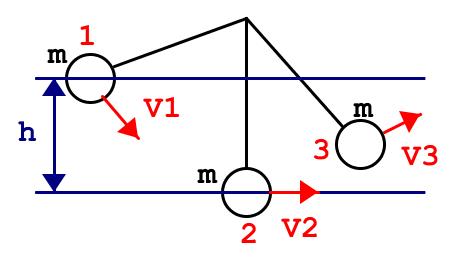
Nella posizione 1 la velocità è nulla è l’energia posseduta dalla massa m è solo quella potenziale (che rappresenta la tensione o “potenziale elettrico”). Lasciato libero di cadere aumenta la propria velocità trasformando l’energia potenziale in energia cinetica . Nel punto 2, energia potenziale nulla (rispetto al riferimento scelto) e la velocità sarà massima (massima energia cinetica). Ora, se non vi è smorzamento dovuto agli attriti (componente “resistiva” che dissipa energia) dal punto 2 tornerà alla medesima altezza del punto 1: pendolo ideale. Se invece lo smorzamento è presente, oscillera fino a fermarsi in modo “smorzato”: tutta l’energia posseduta nel punto 1 è stata dissipata in calore (come nella resistenza).
Quindi, se è presenta attrito il pendolo prima o poi si fermerà (a seguito di oscillazioni smorzate). L’analogia con l’ elettrotecnica è completa: senza resistenza l’energia viene scambiata dalle reattanze ma non si trasforma in calore. La presenza della resistenza, invece, fa si che l’energia “esca” dal circuito sottoforma di calore (effetto Joule).
Matteo Gentileschi


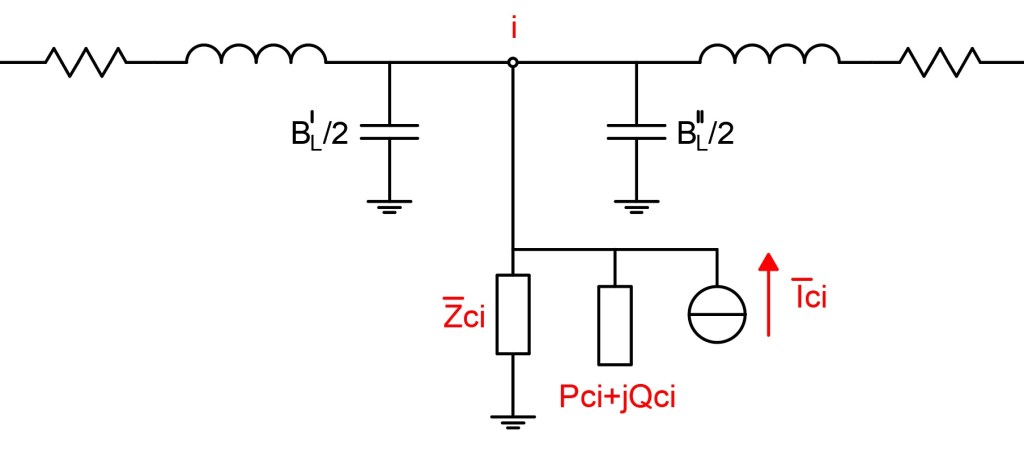
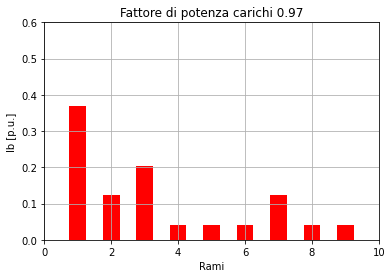
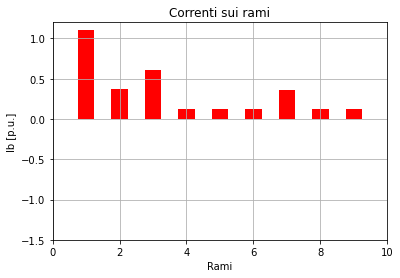
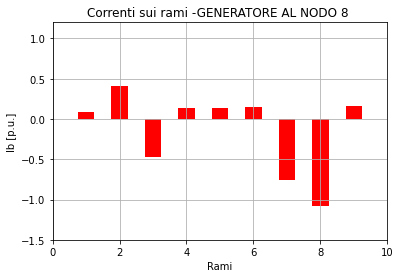
 , le correnti sui rami (Ib). Ora, passando alla scrittura matriciale:
, le correnti sui rami (Ib). Ora, passando alla scrittura matriciale:













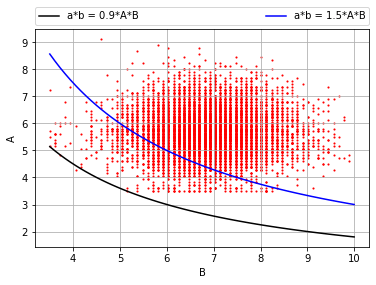
 vuol dire che il denominatore è maggiore del numeratore, ovvero che
vuol dire che il denominatore è maggiore del numeratore, ovvero che  . In altri termini, le forze instabilizzanti sono superiori a quelle che si oppongono a tale instabilizzazione. Pertanto, a seconda dell’incertezza dei parametri, è bene mantenere tale rapporto superiore all’unità.
. In altri termini, le forze instabilizzanti sono superiori a quelle che si oppongono a tale instabilizzazione. Pertanto, a seconda dell’incertezza dei parametri, è bene mantenere tale rapporto superiore all’unità. 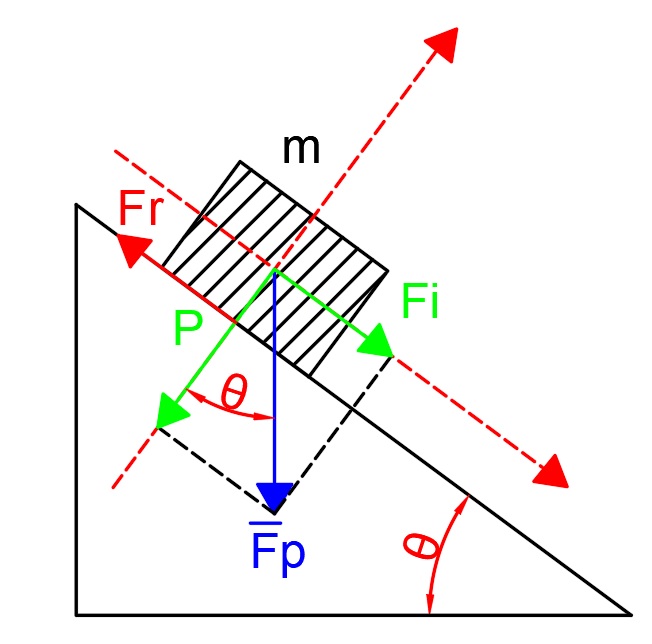








 sia nullo.
sia nullo. 



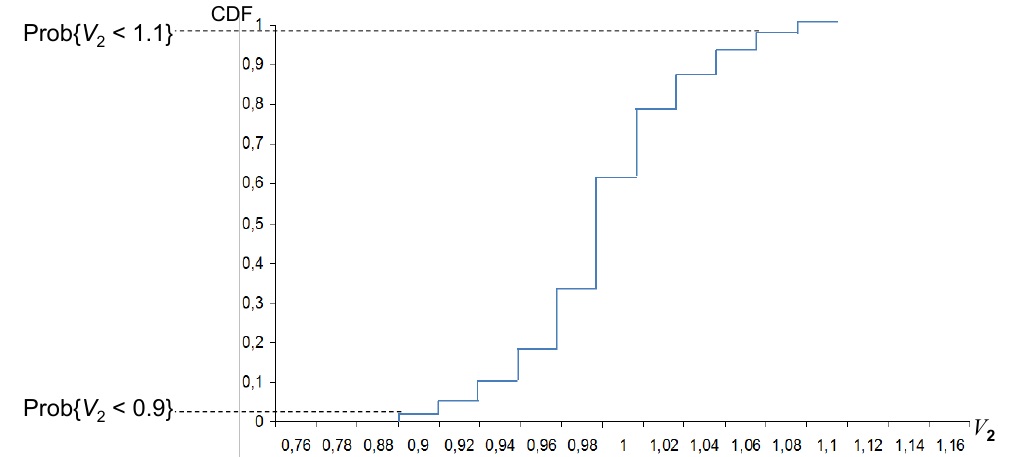
 è minore ad un certo valore limite
è minore ad un certo valore limite  che per questioni cautelative poniamo pari a 1.05, 5% in più del necessario, per poi calcolare la frequenza con cui ciò accade.
che per questioni cautelative poniamo pari a 1.05, 5% in più del necessario, per poi calcolare la frequenza con cui ciò accade.

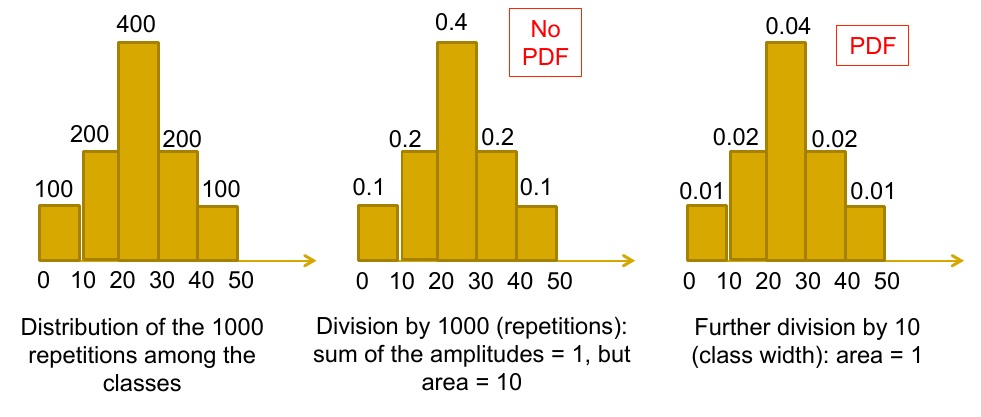
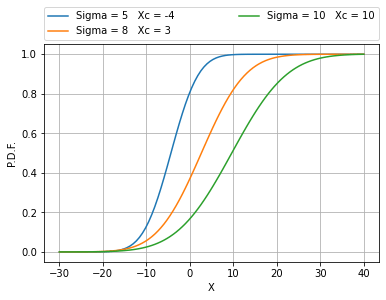
 è il e
è il e  è la “varianza“.
è la “varianza“.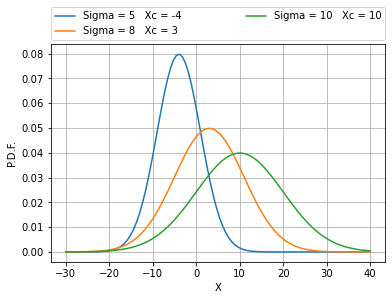
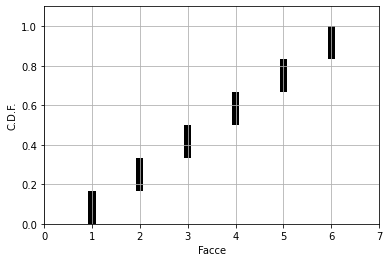
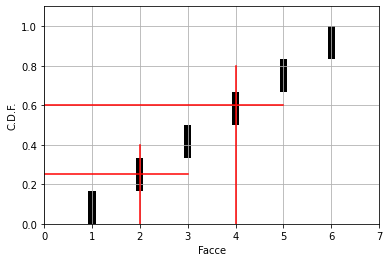

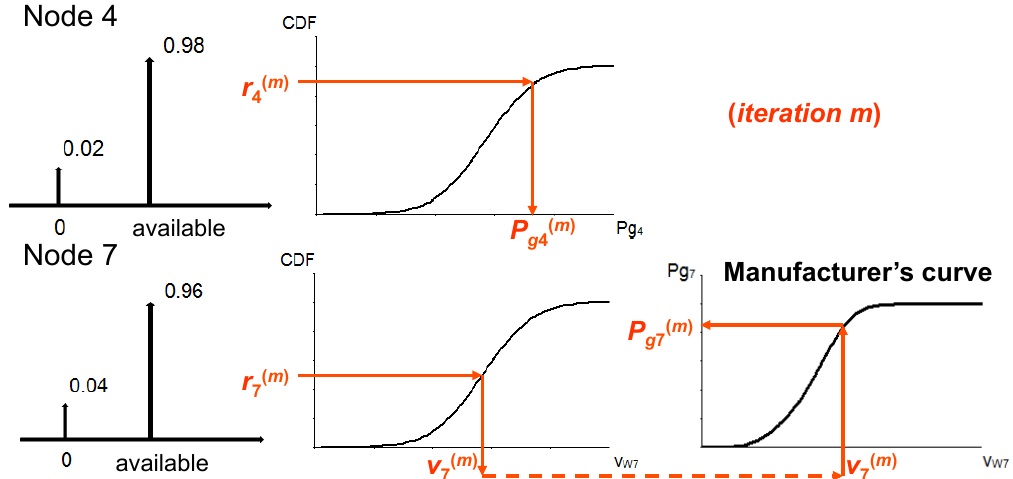
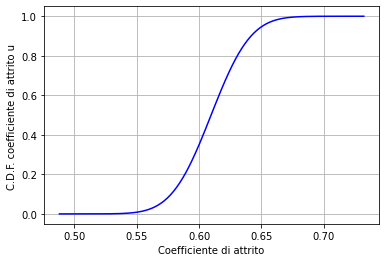
 che sia disponibile e
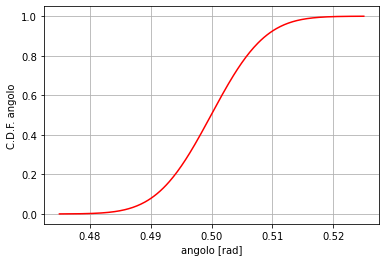
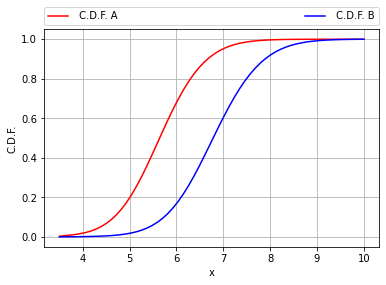
che sia disponibile e  che non lo sia: grazie alla relativa C.D.F., estraendo r si ottiene la disponibilità del generatore.
che non lo sia: grazie alla relativa C.D.F., estraendo r si ottiene la disponibilità del generatore.