Nelle applicazioni di potenza, come nei convertitori statici, le commutazioni avvengono grazie a dispositivi a semiconduttori come BJT, MOSFET, IGBT, SRC ecc.
Le correnti nei semicondutori sono dell’ordine degli e possono supportare tensioni fino alle centinaia di kv a mm (rigidità dielettrica ) .
Gli effetti delle commutazioni vertono inesorabilmente sugli interruttori (sovratensioni e sovracorrenti) pertanto è necessario studiarne le caratteristiche ai fini di garantire l’affidabilità della struttura.
BJT
Il BJT (bipolar junction transistor) è un transistor a giunzione bipolare. La conduzione avviene grazie ai portatori minoritari: un BJT è in conduzione fino a che viene iniettata corrente sulla base (normalmente OFF). La carica è una funzione integrativa della corrente, pertanto un BJT presenterà un polo (nella relativa funzione di trasferimento), ovvero la risposta (variazione corrente di collettore) avverrà in ritardo rispetto allo stimolo di ingresso (variazione corrente di base).
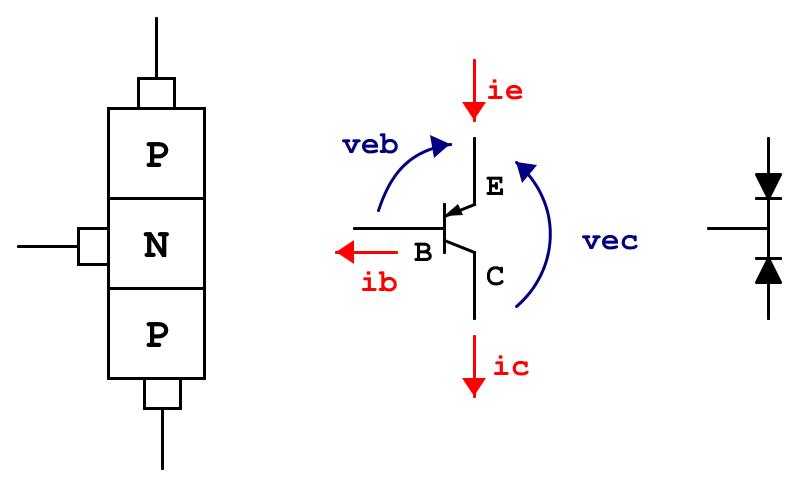
Si distinguono due tipi di transistor NPN e PNP.
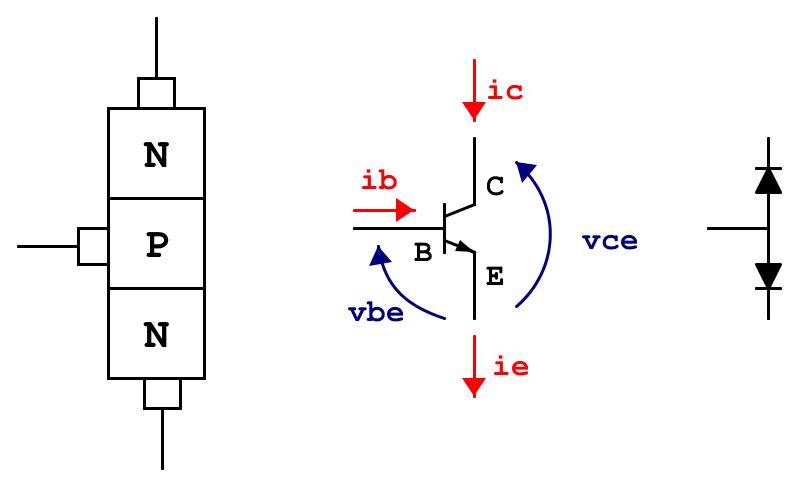
TRANSISTOR NPN
TRANSISTOR PNP
La la base (B) è flottante, la struttura è a tutti gli effetti un doppio diodo in controfase. Se si applicasse, in questa condizione, una tensione vce, uno dei due diodi risulterebbe interdetto (polarizzato inversamente): pertanto il BJT è “normalmente OFF” (se non si fornisce corrente alla base, il BJT non conduce).
La non bidirezionalità è data dalla differenziazione di drogaggio tra le regioni C ed E: questo permette miglior interdizione per una tensione vce positiva.
Iniettando corrente nella regione di base (carica minoritaria) la giunzione C-B entra in conduzione. Notare che la carica minoritaria si ricombina con quella maggioritaria (eco spiegato perché pertanto per mantenere il bjt in conduzione è necessario iniettare continuamente corrente).
La corrente di collettore e di base sono correlate dal temine “hfe” definito come guadagno di corrente. Il termine Hfe è piuttosto variabile con la temperatura oltre che a dipendere dalla tensione Vce:
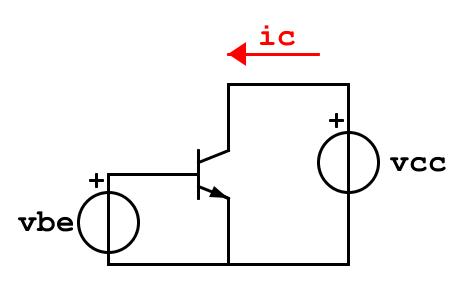
Negli NPN la corrente fluisce dalla base all’emettitore : questo funge quindi da riferimento per chiudere il circuito di pilotaggio.
In pratica la corrente di base ib, necessaria a sostenere la corrente ic è pari a :
Sarà dunque necessaria una potenza di pilotaggio (fornita dal driver) pari a :
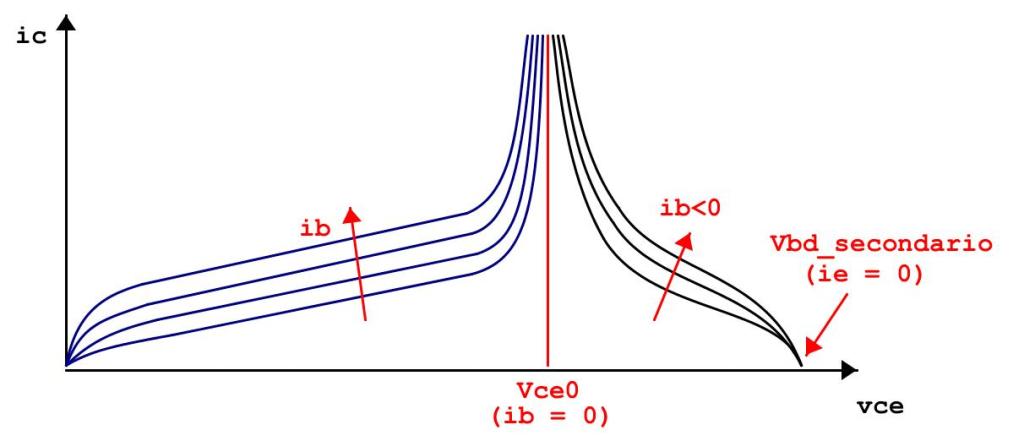
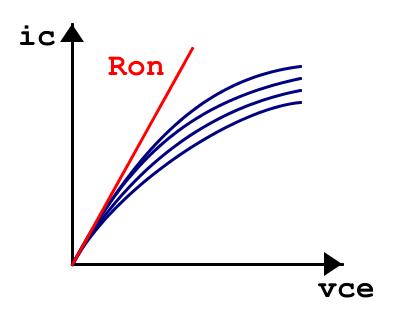
Le caratteristiche ingresso-uscita sono definite sperimentalmente.
Ogni retta viene tracciata per una determinata ib. Quando la tensione vce raggiunge Vce0 (tensione di break down primario) si ha la perdita di controllo: viene definita per ib = 0 (base aperta).
Lasciando aperto il collettore (ie=0), si definisce la tensione di break down secondario (pari a quella della giunzione C-B).
Il break down secondario è legato alle “disomogeneità”: localmente la corrente (in prossimità della giunzione) si incanala in zone “preferenziali” (ovvero ove trtova minor resistenza) causando un locale aumento della temperatura e quindi (essendo un conduttore) un calo della resistività locale che favorisce ulteriormente l’eterogeneità della distribuzione di corrente: tale fenomeno, che presenta retroazione positiva, viene chiamato fuga termica.
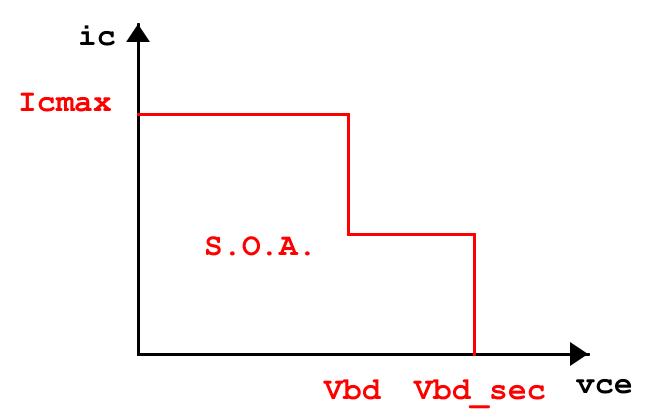
Viene quindi definita la “SOA”, ovvero l’area di sicurezza (Safety Operating Area), all’ esterno della quale non può cadere il punto di lavoro del bjt (pena, la distruzione).
Essendo i limiti in corrente imposti da vincoli di natura termica ( essendo le inerzie termiche maggiori di quelle elettriche) è possibile uscire dalla S.O.A. per un tempo limitato (qualche microsecondo), rimanendo comunque dentro i limiti dichiarati dal costruttore.
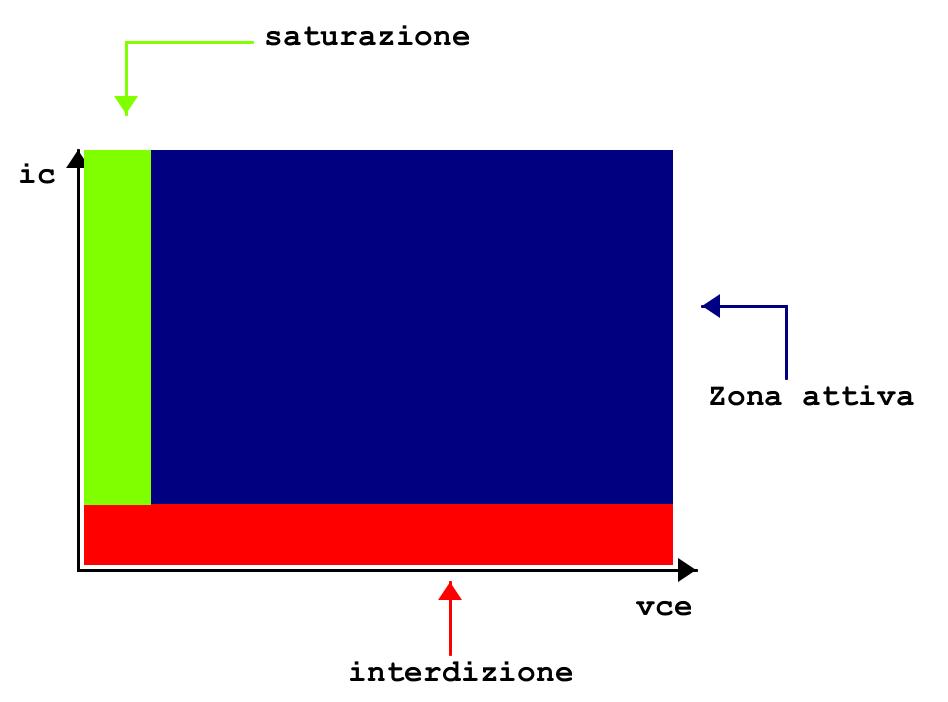
Si possono distinguere tre zone: * Zona di interdizione; * Zona attiva; * Zona di conduzione;
Zona di interdizione
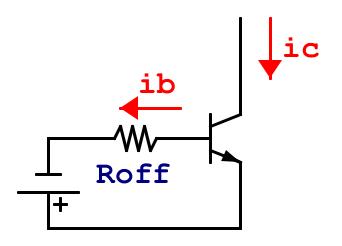
Regione in cui la corrente di collettore è nulla (OFF). Si ha interdizione quando i portatori minoritari nella regione di collettore sono stati opportunatamente drenati. Non essendo omogeneo l’accesso a tali portatori (metalizzazioni localizzate in una regione geometrica) ed essendo la giunzione B-E a natura capacitiva, occorre polarizzare la base in modo da avere correnti ib negative, tali da portare via la carica.
Si noti che si è nella regione di break down secondario.
Zona di saturazione
Il BJT presenta un crollo del guadagno di corrente in prossimità della vce di “miglior conduzione”:
Zona attiva
In zona attiva si ha che la corrente di collettore è proporzionale alla corrente di base tramite il parametro hfe (numero puro dell’ordine delle centinaia).
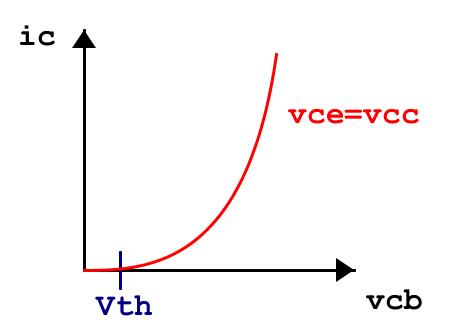
La tensione vce coincide con Vcc, dunque è imposta. In queste condizioni la corrente di collettore ic dipende da vbe come di seguito illustrato:
Affinchè entri in conduzione è però necessario che la tensione sulla base superi il valore Vth.
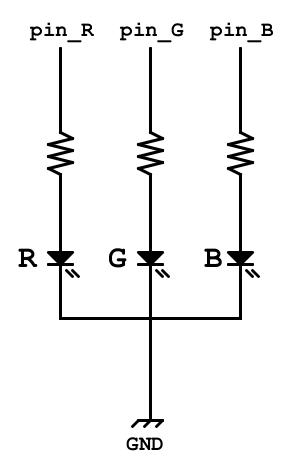
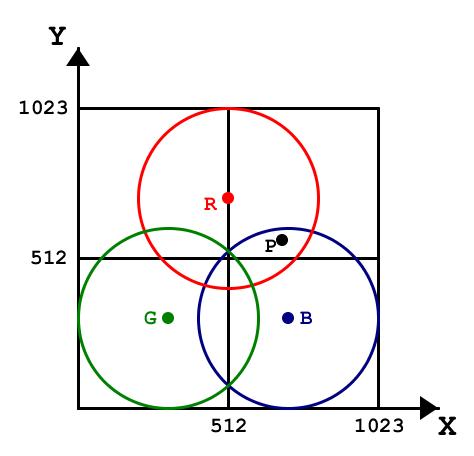
I led RGB (Red, Green, Blue) sono dei led modulari ovvero sono presenti tre led ognuno con la propria lunghezza d’onda di emissione . Consentono dunque di ottenere differenti colori miscelando i tre colori del modello RGB: rosso, verde e blu (da non confondere con i colori primari).
La lunghezza d’onda dipende dal semiconduttore di cui è composto, ad esempio Seleniuro di zinco o Carburo di silicio per il Blu, Fosfuro di gallio per il verde ecc.
Va da se che si avranno tensioni di soglia differenti per ogni colore (tensione al di sotto della quale il diodo non entra in conduzione).
Notare che differenti tensioni di soglia, a parità di alimentazione, si traducono in diversi valori di resistenza da collegare in serie.
La luminosità viene modulata variando il valor medio della corrente, ovvero modulando in modo opportuno la tensione di alimentazione. In questo modo si riesce a modulare con elevata dinamica la potenza fornita al diodo (modulazione PWM: non esplicitata in questo articolo).
Generalmente i microcontrollori presentano dei moduli appositi per la generazione di segnali PWM con frequenza e duty-cycle imposti, ma è bene rammentare che le GPIO di tali dispositivi non sono dimensionate per fornire correnti troppo elevate.
Di seguito lo schema di connessione del modulo ad un microcontrollore . Per comodità i pin vengono nominati a seconda del colore che gestiscono (si rammenta che bisogna connetterli nei pin con simbolo “~ ” se si lavora con Arduino, che sta ad indicare l’uscita di uno dei moduli PWM, con altri controllori è necessario consultare i fogli tecnici).
In questo progetto si utiliza una scheda Arduino UNO (R3). La frequenza di commutazione per pin 9,10 e 11 (relativi ai moduli PWM dell’ATMEGA) di default è di circa 500Hz (T=2ms).
Volendo variare la composizione dello spettro luminoso (in intensità) si può ricorrere ad un “JOYSTICK” , che altro non è che un doppio potenziometro ad assi incrociati.
Le tensioni di uscita (che vanno da 0v a Vcc) saranno le coordinate di un punto nel piano XY:
Il convertitore AC/DC presenta una risoluzione di 10bit. Pertanto il valore letto (ad esempio dai canali A0 e A1) andrà da 0 a 1023. Fissando le coordinate del punto P (x e y letti dal partitore) si definisce il punto di lavoro del modulo. Per ogni colore, il valore di duty-cycle (che si traduce, in intensità luminosa)è proporzionale alla distanza tra il centro del cerchio relativo a quel colore e il punto P. Se maggiore di un certo raggio R quel colore non sarà acceso. Nell’esempio in figura il led verde resterà spento mentre il blu e il rosso verranno miscelati opportunatamente.
Lo sketch in arduino:
//pin PWM ( ~ )
#define PIN_R 9
#define PIN_G 10
#define PIN_B 11
int x,y; //coordinate punto P
//coordinate centro dei cerchi
int x_r = 512,y_r = 718;
int x_g = 206,y_g = 206;
int x_b = 718,y_b = 206;
float R = 600;//raggio del cerchio
float dis; //distanza dai P dal centro del cerchio
//canali analogici
const int X_pin = A1;
const int Y_pin = A0;
void setup() {
pinMode(PIN_R ,OUTPUT);
pinMode(PIN_G ,OUTPUT);
pinMode(PIN_B ,OUTPUT);
}
void loop() {
//letture
y = analogRead(X_pin);
x = analogRead(Y_pin);
analogWrite(PIN_R,int(intensity(x_r,y_r)));
analogWrite(PIN_G,int(intensity(x_g,y_g)));
analogWrite(PIN_B,int(intensity(x_b,y_b)));
delay(100);
}
//funzione assegnazione duty-cycle
int intensity(int xp,int yp){
int pwm;
dis = sqrt(pow(x-xp,2)+pow(y-yp,2));//Pitagora
if(dis<= R){
pwm = int(255*dis/R); //convert to int (serve intero)
}
else{
pwm = 0; //se fuori dal cerchio: colore spento
}
return pwm;
}
Il delay() all’interno del loop principale serve ad evitare che si cambino parametri ai moduli pwm troppo velocemente. La risposta dinamica rimane comunque buona.
Introducendo la funzione random() si può riprodurre il classico sfarfallio di una fiamma e creare effetti luminosi tipo quelli di una candela accesa:
//pin PWM ( ~ )
#define PIN_R 9
#define PIN_G 10
#define PIN_B 11
//porzione duty-cycle randomizzata
int R_rand =200;
int G_rand =10;
int B_rand =6;
//porzione duty-cycle fissa
int R =50;
int G =0;
int B =0;
//ritardo (randomizzato)
int del_rand = 150;
void setup() {
pinMode(PIN_R ,OUTPUT);
pinMode(PIN_G ,OUTPUT);
pinMode(PIN_B ,OUTPUT);
}
void loop() {
analogWrite(PIN_R, random(R_rand)+R);
analogWrite(PIN_G, random(G_rand)+G);
analogWrite(PIN_B, random(B_rand)+B);
delay(random(del_rand));
}
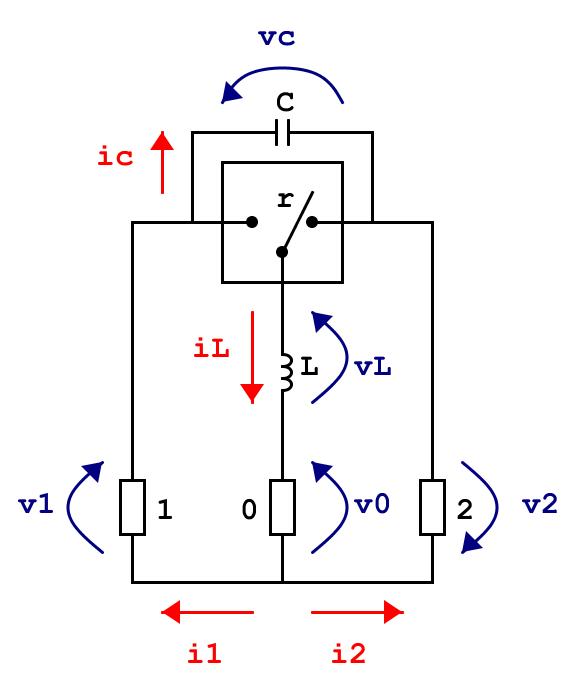
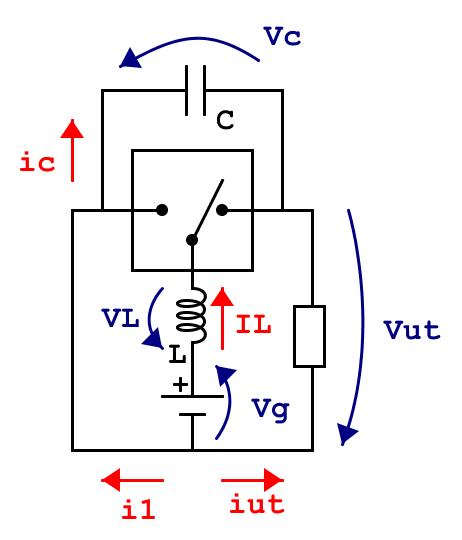
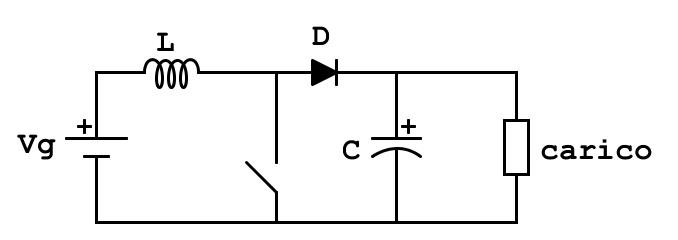
Lo schema di principio di un convertitore statico è il seguente:
I bipoli 120 sono, al momento, bipoli generici. Le convenzioni di segno andranno rispettare durante la trattazione ai fini di distinguere generatori e utilizzatori.
Il deviatore “r”, in questa sede, è un deviatore ideale: le commutazioni avvengono all’istante (non entra nella trattazione la caratteristica dell’interruttore).
L’induttore “L” serve per garantire la compatibilità nelle chiusure: chiudendo un carico capacitivo, infatti, si hanno delle sovracorrenti importanti che danneggerebbero l’interruttore.
Di contro, la capacità “C” serve per garantire la compatibilità sulle aperture: aprendo un carico induttivo, infatti, si avranno delle sovratensioni che verterebbero in maniera gravosa sull’interruttore.
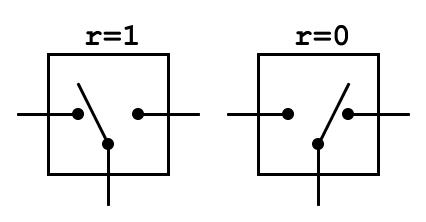
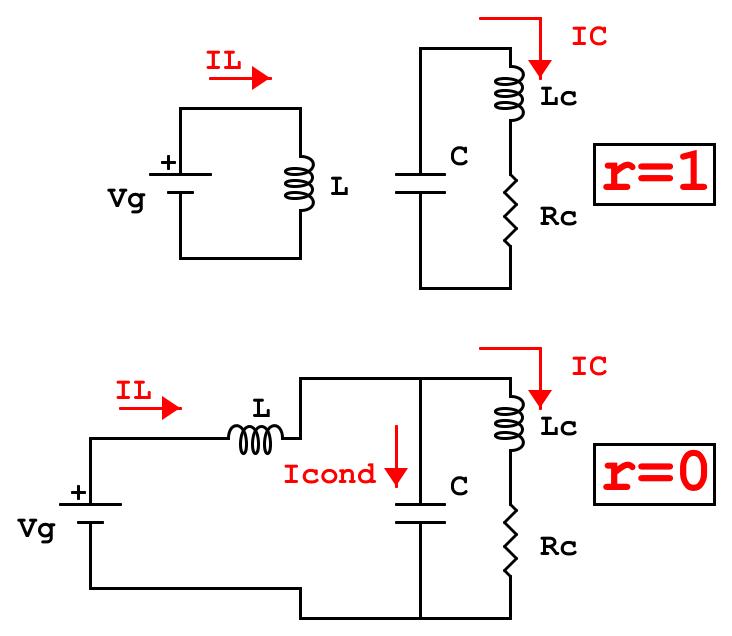
L’interuttore si traduce in un “bit”: posizione 1 e posizione 0 .
Posizione deviatore relativa allo “stato logico” del bit r
Le equazioni del circuito sono dunque le seguenti:
Tali relazioni sono valite istante per istante. In pratica (con commutazioni istantanee) il deviatore fa si che si abbiano due circuiti differenti per i suoi due stati. Esso rimane nella posizione “r=1” per un tempo e rimane nella posizione “r=0” per un tempo pari a . Il periodo in esame sarà dunque :
Passando ai valori medi:
Particolare attrenzione va rivolta all’addendo di tipo :
Il termine integrando “” lo si considera come prodotto di funzioni ortonormali. In tal caso, l’integrale del prodotto è pari al prodotto degli integrali.
i valori istantanei sono rappresentati in corsivo, mentre quelli medi sono rappresentati con lettere maiuscole:
Il termine D prende il nome di “Duty-Cycle” e può assumere valori da 0 a 1, Le equazioni possono quindi essere scritte in termini di valor medio:
Il valor medio della tensione sull’induttore, a regime, deve esser nullo (altrimenti la corrente crescerebbe a rampa virtualmente fino a raggiungere un valore infinito.
Di seguito le differenti “configurazioni”.
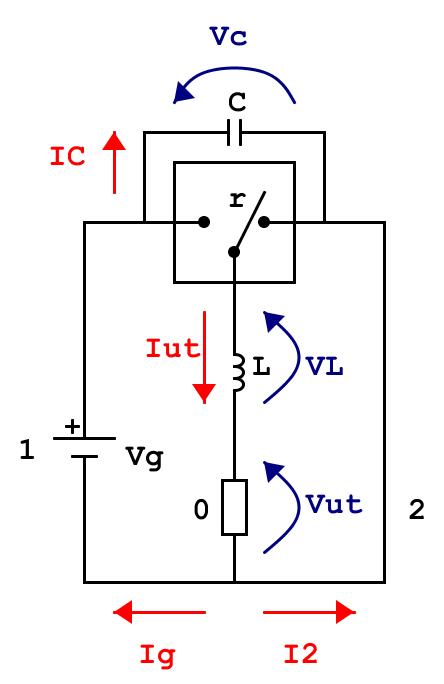
step-DOWN
Data la seguente configurazione:
Il bipolo 0 diventa il carico e il bipolo 1 il generatore. Il bipolo 2 viene cortocircuitato e dunque V2=0, V0 = Vut e V1 = Vg. . Notare che, nel caso specifico, Vc = Vg sempre. Le equazioni diventano
La tensione sul carico è così determinabile (Vc=Vg):
Il nome “step-down” deriva dal fatto che la tensione di uscita (Vut) è minore (o uguale) alla tensione del generatore.
NOTA: negando il segnale duty-cycle (che pilota il deviatore) si avrebbe:
Codice MatLab per l’analisi Dinamica. Si risolvono due circuiti separati (a seconda dello stato di “r”). La condizione iniziale per la corrente (V.D.S.) è lo stato finale del circuito precedentemente risolto. La risoluzione avviene per diversi periodi, fino alla condizione di regime. Si veda come risolvere un generico circuito in MatLab.
%STEP-DOWN
close all
clear
clc
%Convertitore
L = 0.01;%[H]
%Generatore
Vg = 10; %[v]
%Carico
Rc = 1; %[ohm]
Lc =0.01; %[H]
%Duty-Cyle
D = 0.3;
%Periodo
T = 0.01;
tau_c = (Lc+L)/(Rc);
n = 100;
n_periodi = 15;%numero periodi in esame
t_span_1 = 0:tau_c/n:D*T; t_span_2 = 0:tau_c/n:(1-D)*T;
%Equazione di maglia r=1
mr1 = @(t,i) -(Rc/(Lc+L))*i; %Equazione di maglia r=0mr2 = @(t,i) (1/(Lc+L)*(Vg-Rc*i));
I = 0;
I_0 = 0; %corrente iniziale nulla
for i =1:n_periodi
[t_1,i_1] = ode23t(mr1, t_span_1,I_0);
%condizioni iniziali nuovo circuito = condizioni finali
%circuito precedente (I_0)
I_0 = i_1(end);
[t_2,i_2] = ode23t(mr2, t_span_2,I_0);
%condizioni iniziali nuovo circuito = condizioni finali
%circuito precedente (I_0)
I_0 = i_2(end);
I = [I;i_1;i_2];%concatena vettori corrente
end
I(1)=[];
t = 0:n_periodi*T/length(I):n_periodi*T;
t(end) = [];%APPROSSIMAZIONE:
%I e t devono avere lo stesso numero di elementi!
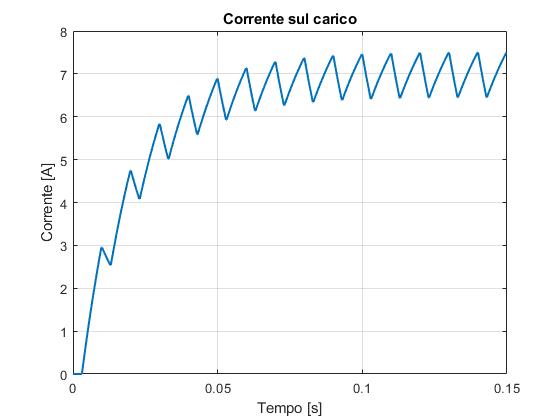
plot(t,I,'linewidth',1.5)
xlabel("Tempo [s]")
ylabel("Corrente [A]")
title("Corrente sul carico")
grid on
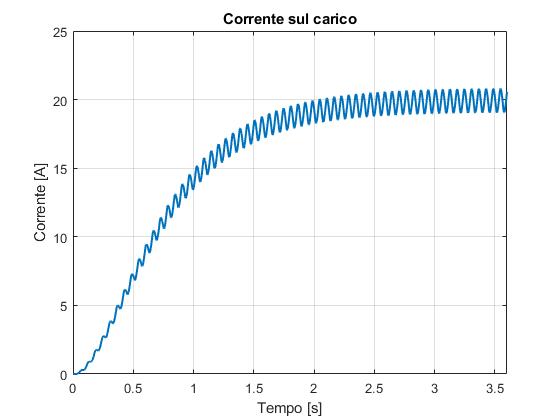
La verifica della bontà della simulazione è semplice. Si nota (dal grafico, ma serebbe possibile calcolarla agevolmente dallo script) che la corrente media a regime è pari a 7A per un Duty-Cycle di 0.3 (30%). A regime la tensione media su un induttore è nulla(Altrimenti la corrente salirebbe all’infinito), pertanto la tensione media sul carico è pari alla tensione media sulla resistenza Rc:
(Nella simulazione si è impostato Rc = 1 ohm)
Notare che se si rallentasse la dinamica del carico (aumentando Lc o diminuendo lo smorzamento riducendo Rc), il sistema impiegherebbe più tempo ad arrivare a regime.
A parità di altri parametri, in blu la curva con L maggiore. In quel caso il sistema andrà a regime più tardi ma il ripple sarà minore. Si riesce anche ad appezzare come nel caso della curva rossa si intraveda una leggera curvatura del “dente”: ciò è dovuto al fatto che la costante di tempo è troppo piccola rispetto al periodo di commutazione, pertanto incomincia a distinguersi l’andamento esponenziale.
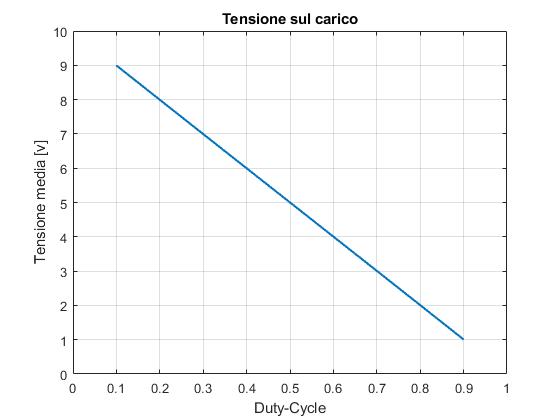
Variando il duty-cycle il valor medio di tensione (calcolato a regime) varia, coerentemente con la formulazione precedentemente illustrata:
NOTA: il carico è un R-L. La compatibilità della commutazione è garantita dall’induttanza. Il generatore infatti ha natura capacitiva. Per garantire la corretta commutazione è necessario che si comutino due circuiti di natura duale.
Lo step-down è un convertitore a diretto: è possibile collegare il carico direttamente alla sorgente (o disalimentarlo totalmente).
Step-up (BOOST)
Ancora una voltai versi scelti sono arbitrari ma i calcoli eseguiti dovranno essere coerenti con essi, in caso contrario si avranno dei risultati errati. In questa configurazione si ha che la tensione media di uscita (a regime) sarà (in modulo):
NOTA :si ramenta che i modelli presentati funzionano con duty-cycle negato.
Va osservato che lo schema proposto è al primo livello di progettazione, ovvero quello funzionale. Lo schema di un boost converter reale è il seguente:
Quando l’interruttore è chiuso, l’anodo del diodo è a potenziale minore rispetto al catodo, quindi si spegne. Questo fa si che non avvenga il passaggio di corrente dalla sezione del carico al generatore. Non è possibile rigenerare.
Come per il caso dello step-down, si analizzano separatamente i circuiti che si vengono a creare ai diversi stadi dell’interruttore.
circuiti separati
Si risolvono le equazioni differenziali mettendo come condizioni al contorno i valori delle v.d.s. all’istante finale delo stato precedente. Va osservato però che le cose si complicano a causa della presenza del diodo.
NOTA: Volendo costruire un modello che tenga conto anche del diodo bisognerebbe considerare che le correnti su L potrebbero cambiare di segno: ciò non può sucedre per via del diodo. Pertanto anche nel caso di r=0, nonappena IL sta per cambiare di segno, quello che succede è che viene escluso il circuito a sinistra (non vi sarà più il nodo).
Script MatLab
%BOOST
close all
clear
clc
%Convertitore
L = 0.2;%[H]
C = 0.2; %[f]
%Generatore
Vg = 10; %[v]
%Carico
Rc = 1; %[ohm]
Lc =0.01; %[H]
%Duty-Cyle
D = 0.5;
%Periodo
T = 0.06;
n = 1000;
n_periodi = 60;%numero periodi in esame
t_span_1 = 0:DT/n:DT;
t_span_2 = 0:(1-D)T/n:(1-D)T;
%Equazione di maglie r=1
f_m1 = @(t,i) Vg/L; %equazione differenziale
i_0 = 0; %corrente iniziale nulla
M_1= [ -Lc 0; 0 C];
K_1 = [-Rc 1;1 0];
options_1=odeset('Mass',M_1,'MassSingular','yes');
m1 = @(t,x) -K_1x ;X_0_1 = [0;0]; %Equazione di maglie r=0 M_2= [L 0 0; 0 Lc 0; 0 0 C]; K_2= [0 0 1; 0 Rc -1; -1 1 0]; b = [-Vg; 0; 0]; options_2=odeset('Mass',M_2,'MassSingular','yes'); m2 = @(t,x) -K_2x -b;
X_0_2 = [0;0;0];
I = 0;
for i =1:n_periodi
[t,i] = ode23(f_m1, t_span_1, i_0);%solver
I_L = [I_L;i];
[t,x]= ode23t(m1,t_span_1,X_0_1,options_1);
X_0_2 = [i(end);x(end,1);x(end,2)];
I = [I;x(:,1)];
[t,x]= ode23t(m2,t_span_2,X_0_2,options_2);
I_L = [I_L;x(:,1)];
X_0_1 = [x(end,2);x(end,3)];
i_0 = x(end,1);
I = [I;x(:,2)];
end
I(1)=[];
figure;
t = 0:n_periodiT/length(I):n_periodiT;
t(end) = [];%APPROSSIMAZIONE:
plot(t,I,'linewidth',1.5)
xlabel("Tempo [s]")
ylabel("Corrente [A]")
title("Corrente sul carico")
grid on
axis([0 t(end) 0 25])
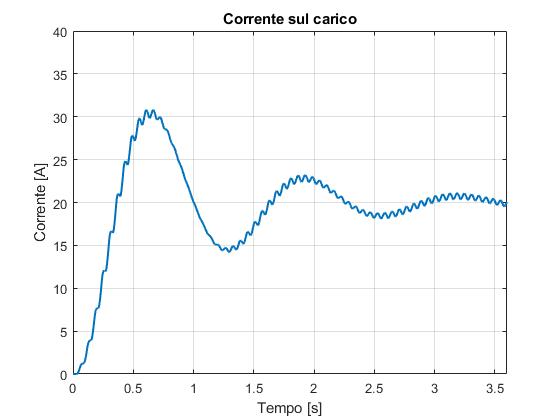
Con un duty-cycle del 50% si ha una corrente media sul carico (a regime) di 20A: che su un carico Rc-Lc (Rc = 1ohm) corrisponde ad una tensione media pari alla caduta su Rc: 20v.
Va tenuto presente che si tratta di un circuito del secondo ordine e che quindi, se non ben progettato, potrebbe creare dei problemi:
Rispetto al caso precedente quì si è ridotta L ed aumentato C.
La Potenza è definita come “il lavoro svolto nell’unità di tempo”. In Elettritecnica si fa riferimento al lavoro svolto dal Campo Elettrico sulla carica elettrica (elettrone). Definito il “Potenziale Elettrico” v(t) e la “Corrente Elettrica” i(t) si può scrivere la potenza p(t) (potenza istantanea) come :
Le unità di misura, riconosciute dal Sistema Internazionale (S.I.) sono:
Per la tensione : [v(t)] VVolt
Per la corrente: [i(t)] A Ampere
Per la potenza: [p(t) ] W Watt
La potenza media , sul perioto T (inverso della frequenza). è definibile come segue:
Ora, una generica funzione F(x) può essere scomposta come somma di un termine costante e la sommatoria di termini a pulsazione multipla (si veda la “serie di Fourier”):
Quindi anche la potenza può essere rappresentata dal proprio contenuto armonico. Le interazioni tra corrente e tensione, ai fini del calcolo di potenza, avvengono per armoniche dello stesso ordine.
Trattandosi di sinusoidi, si può semplificare la trattazione definendo:
[va]
[w]
[var]
Dove “V” e “I” sono i valori efficaci (r.m.s.) rispettivamente di tensione e corrente.
La potena attiva è la “componente continua” della potenza apparente mentre quella reattiva è il termine sinusoidale.
Situazione fasoriale
Utile ricordare che la corrente, in un carico reattivo, presenta uno sfasamento rispetto alla tensione a causa della natura stessa del carico. Su un condensatore, essendo la variabile di stato la tensione, la corrente è in anticipo su di essa. La tensione ai capi del condensatore è proporzionale alla carica accumulata. La corrente, che è una corrente di spostamento, si traduce nel suddetto accumulo di cariche. Deve esservi uno spostamento di cariche affinchè ci sia tensione.
Viceversa, su un induttore, la variabile di stato è la corrente. La forzante è la tensione. Si deve applicare una tensione per avere variazione di corrente. Tensione che è quindi in anticipo sulla corrente. (Notare che per avere una variazione a gradino della corrente bisognerebbe applicare una tensione infinita!).
Data la pulsazione elettrica si ha:
Bisogna rammentare alcune formule trigonometriche per completare la trattazione :
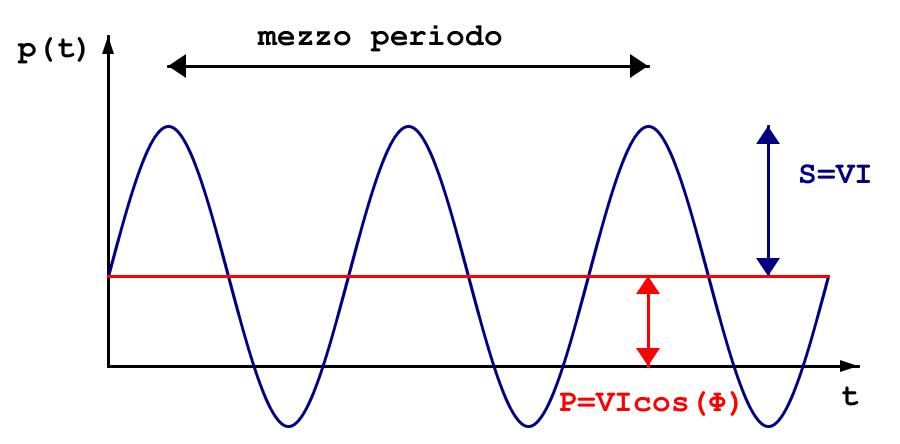
Quindi:
Si ha dunque un termine a frequenza doppia.
Definendo , il valor medio della vale:
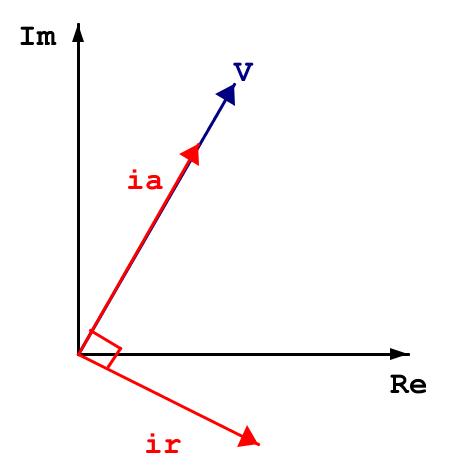
Si può scomporre la corrente in due termini: corrente attiva e corrente reattiva . Considerando che la corrente è in ritardo(sul carico reattivo) sulla tensione:
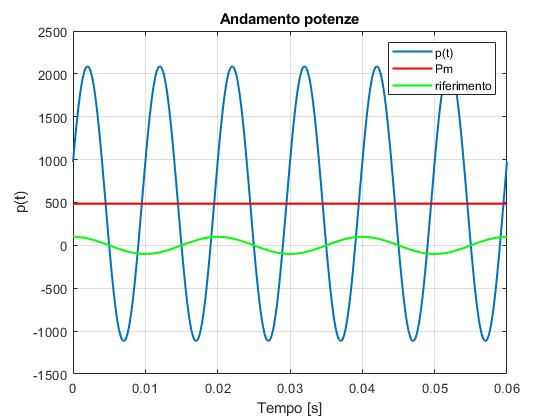
La potenza istantanea può essere scritta come somma dei termini reattivo ed attivo:
Notare che è unidirezionale, dipendente dal segno di .
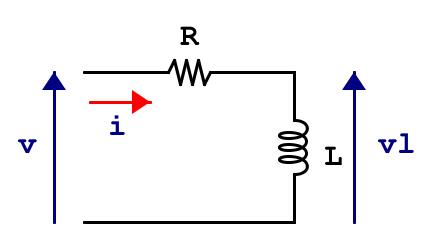
Prendiamo ad esempio un carico R-L (si veda come risolvere un circuito generico).
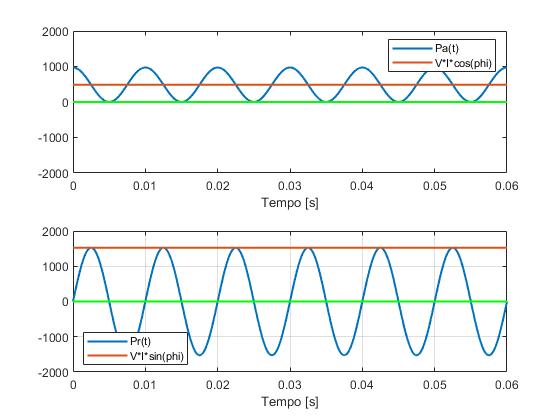
In verde è riportata la forma d’onda di riferimento(pulsazione della tensione ) : la potenza presenta frequenza doppia. Plottando separatamente le tue componenti della potenza istantanea:
Come pronosticato, la potenza attiva è unidirezionale. La componente reattiva, dipende, appunto, dalla reattanza. Se si azzerasse la componente reattiva del carico, lasciando solo la componente resistiva, si avrebbe solo componente attiva.
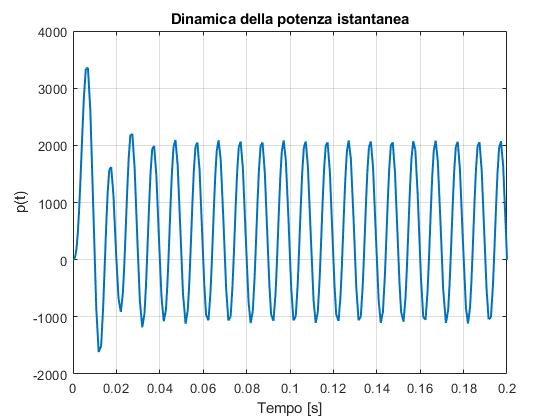
Risolvendo invece il circuito in maniera analitica, non quindi tramite fasori, si osserva l’andamento dinamico della potenza istantanea, che a regime coincide con quella ottenuta dallo studio fasoriale.
Equazioni della maglia:
Script MatLab per la risoluzione del circuito RL:
close all
clear
clc
%Dati
R = 10;%[Ohm]
L = 0.1;% [H]
f = 50;%[Hz]
T=1/f;
w = 2pif;
Vmax=325;%[v]
V = Vmax/sqrt(2);
v = @(t) Vmaxsin(wt);
n=1000;
n_periodi =10;%numero di periodi in esame
t_span = [0 n_periodiT];%finestra temporale in esamei_0 = 0; %corrente iniziale nulla f = @(t,i) -(R/L)i+(1/L)* v(t); %equazione differenziale
options=odeset('InitialStep',T/n);
[t,i] = ode23(f, t_span, i_0,options);%solver
p = @(t) v(t).*i %potenza istantanea
figure
plot(t,p(t),"linewidth",1.5)
title("Dinamica della potenza istantanea")
xlabel("Tempo [s]")
ylabel("p(t)")
grid on
La potenza istantanea mostra dei picchi nelle prime fasi del transitorio maggiori di quelli a regime. Si tratta della potenza di magnetizzazione: in pratica “si carica l’induttanza”.
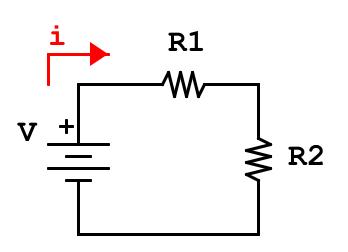
Adattamento di impedenza
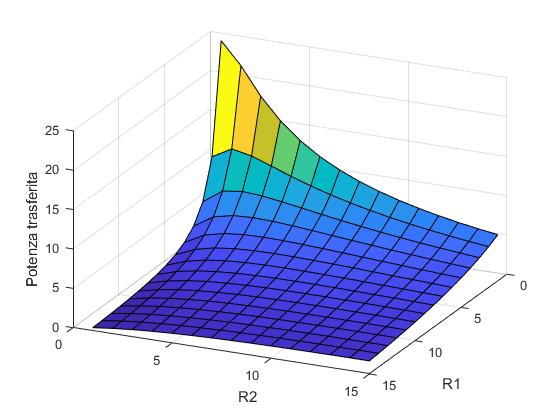
Data la serie di due impedenze si intende valutare quale è la condizione di massima potenza trasferita al carico:
Si analizza in continua, ma i risultati valgono anche per il caso in alternata.
Script MatLab:
close all
clear
clc
%Dati
[R1 R2] = meshgrid(1:1:15);
V = 10;
Ptot = ((V*(R2./(R1+R2))).^2)./R2;
figure
surf(Ptot)
xlabel("R1")
ylabel("R2")
zlabel("Potenza trasferita")
Non è immediato dal grafico ma da un’attenta analisi si osserva che la potenza trasmessa è massima quando:
Il picco di potenza si ha nelle regioni in cui R1 è bassa, altrove la tensione sul carico si abbassa (partitore) e dunque anche la potenza trasmessa.
Rifasare un carico equivale a ridurre la corrente trasportata dalla linea a monte senza perdita di prestazioni. Un carico generico infatti può scambiare potenza reattiva con la rete. Seppur indispensabile per il funzionamento di certi carichi, essa non viene convertita: la sola potenza a produrre un effetto utile in termini di trasformazioni energetiche è quella attiva.
Per tale motivo non è indispensabile che lo scambiodi potenza reattiva con la rete avvenga costantemente.
Le utenze presentano carichi fortemente induttivi induttivi. Non solo i motori elettrici ma anche i dispositivi di illuminazione come le lampade a fluorescenza ecc.
Utile rammentare che la richiesta di un fattore di potenza superiore a 0.9 non è arbitraria: infatti, in tali condizioni, si ha un rendimento migliore della linea trifase rispetto alla linea monofase o in continua a parità di “quantità di rame” presente. Matemeticamente tale condizione si verifica se il fattore di potenza è maggiore di 0.86.
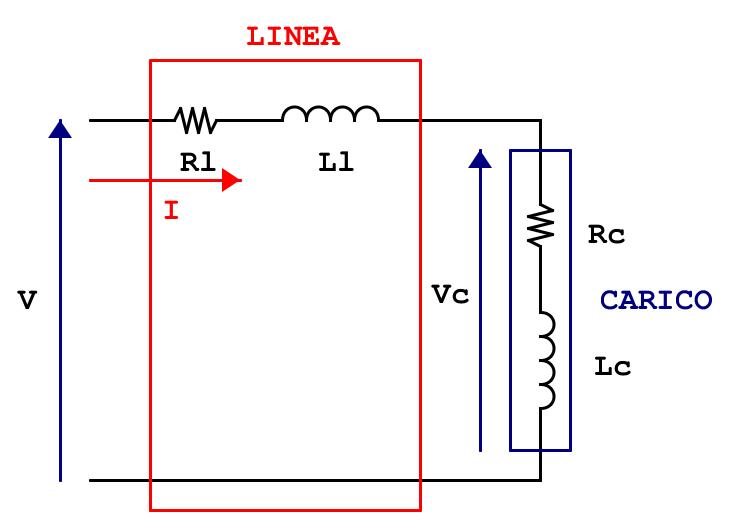
Prendiamo ad esempio il seguente schema bifilare:
nota: Si sono ignorate volutamente le impedenze trasversali che sono di natura capacitiva.
Trattandosi di un circuito del primo ordine è necessario risolvere l’equazione diferenziale di maglia. Con MatLab la cosa risulta piuttosto semplie
%Alimentazione
f = 50;%[Hz]
T = 1/f;%periodo [s]
w = 2*pi*f; %[rad/sec]
Vmax = 230; %[v]
v = @(t) Vmax*sin(wt);
%Dati linea
Rl = 0.1; %[Ohm]
Ll = 0.1; %[H]
%Dati carico
Rc = 0.5;%[Ohm]
Lc = 0.01;% [H]
%equazione differenziale
f = @(t,i) -((Rl+Rc)/(Ll+Lc))i+(1/(Ll+Lc))*v(t);
i_0 = 0; %corrente iniziale nulla
t_span = [0 30*T];%finestra temporale in esame
[t,i] = ode23(f, t_span, i_0);%solver
figure;
plot(t,i,'LineWidth',1.5)
xlabel('Tempo [s]');
ylabel('Corrente [A]');
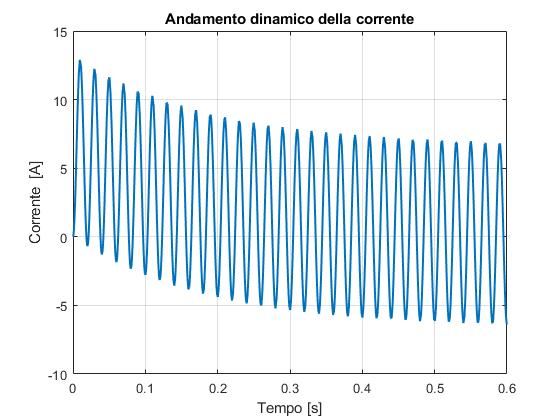
title('Andamento dinamico della corrente');
grid on
Il risultato è il seguente:
Come accennato la pratica del rifasamento consente di ridurre la corrente di linea mantenendo invariato l’effetto utile. Il rifasamento è dunque un vantaggio per il fornitore che si vedrebbe ridotta la sollecitazione sulla linea.
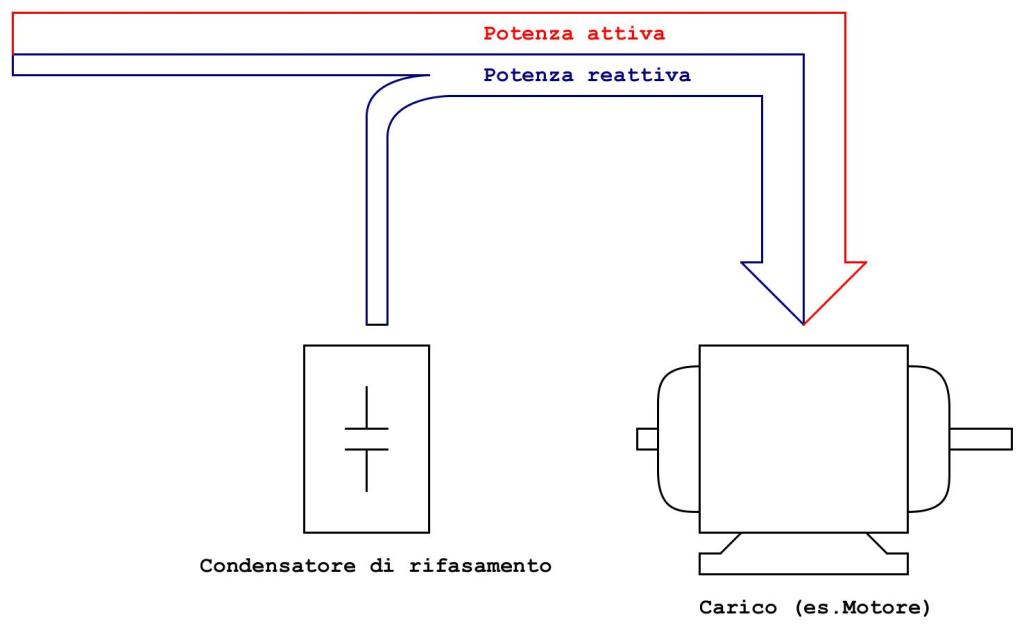
In termini impiantistici rifasare vuol dire quindi ridurre lo sfasamento tra tensione e corrente sul carico in modo tale che, a regime, la potenza trasportata sulla line sia prevalentemente potenza attiva. La potenza reattiva necessaria verrà fornita dal condensatore di rifasamento che si rimbalzerà tale potenza con la parte induttiva del carico.
Come è possibile notare dallo schema, la potenza apparente a monte dell’impianto è minore, ma quella fornita al carico è la medesima.
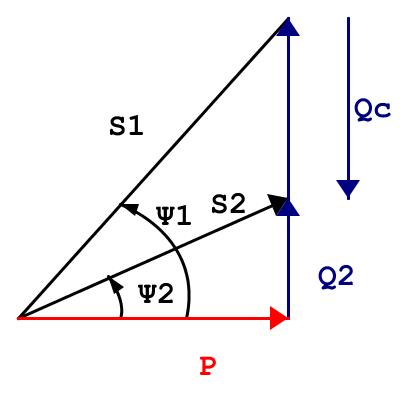
Lo schema fasoriale delle potenze è il seguente:
Mentre S1 è la potenza apparente iniziale, S2 è la potenza (obiettivo). Ovvero si vuole inserire il condensatore che porti lo sfasamento a quello desiderato. In pratica si tratta della potenza reattiva “prodotta” localmente. In termini trigonometrici si ha:
Dato la tensione nominale, dalla potenza reattiva ottenuta con suddetta formula, si risale alla capacità necessaria:
Il seguente script in MatLab svolge i calcoli appena descritti:
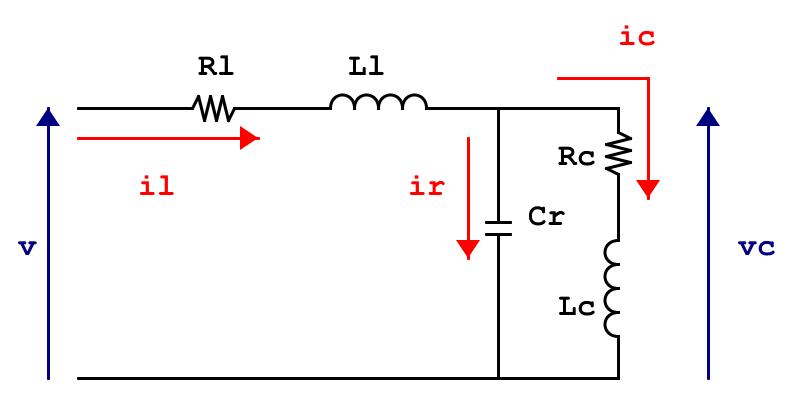
Va osservato però che una volta inserita la capacità in parallelo al carico, ovviemente, il circuito cambia. Non solo perchè diventa del secondo ordine e cambiano le dinamiche, ma perchè la tensione sul carico cambia (partitore).
La tensione utilizzata per il calcolo della capacità (Vmax) è la tensione di ingresso, non quella ai capi del carico. Le linee sono progettate per avere minor caduta di tensione possibile, pertanto è un’approssimazione accettabile. Ai fini “pratici” tale approssimazione viene accettata, ma è essenziale che si abbia la percezione della classe di accuratezza in gioco.
Il circuito ottenuto è questo:
Notare che con il rifasamento, ovviamente, il circuito cambia. Non è possibile in pratica rifasare quanto si vuole o quantomeno i risultati ottenuti si discostano da quelli desiderati.
La capacità di rifasamento è proporzionale, come visto, all’energia reattiva “richiesta” ed inversamente proporzionale alla pulsazione elettrica e al quadrato della tensione. Si utilizza la tensione nominale che non è quella sul carico per via delle cadute sulla linea. Non è possibile utilizzare la tensione sul carico calcolata con un partitore poichè, come detto, il circuito cambia una volta inserita la capacità stessa. Inoltre le tolleranze sui parametri (carico e condensatore di rifasamento stesso sono piuttosto grandi per consentire classi di accuratezza elevati). Per tali motivi si esegue un rifasamento “parziale”, ovvero non si rifasa in modo da ottenere una soluzione “matematicamente esatta”.
A seguire uno script MatLab per il tracciemento dei valori RMS di tensione sul carico e corrente di linea in funzione di quanto si intende rifasare:
close all
clear
clc
format short
%Alimentazione
f = 50;%[Hz]
w = 2pif; %[rad/sec]
V = 220; %tensione nominale RMS [v] (origine di fase)
%Dati linea
Rl = 0.1; %[Ohm]
Ll = 0.01; %[H]
%Dati carico
Rc = 0.5;%[Ohm]
Lc = 0.1;% [H]
Zl = Rl+1i*w*Ll;%impedenza delle linea(complessa) [ohm]
Zc = Rc+1i*w*Lc;%impedenza del carico (complessa) [ohm]
Z =Zl+Zc;
phi_c = angle(Zc);%sfasamento sul carico
%fattore di potenza: da quello iniziale a 1
cos_phi_2 = [cos(angle(Zc)):0.01:0.98]
phi_2 = acos(cos_phi_2);
%corrente assorbita dal sistema [A] (prima del rifasamento)
I = V/Z;
Vc =V* Zc/Z;%tensione sul carico [v] (partitore di tensione)
S_carico = Vc*conj(I); %potenza apparente sul carico Qc=imag(S_carico);%potenza reattiva assorbita dal carico [var] Pc=real(S_carico);%potenza attiva assorbita dal carico [w]
%corrente di linea pre-rifasamento
I= abs(V/(Zl+Zc))ones(length(cos_phi_2),1);
V_2= zeros(length(cos_phi_2),1);
Il = zeros(length(cos_phi_2),1);
for i = 1:length(cos_phi_2)
Qr = Pc((Qc/Pc)-tan(phi_2(i))); %energia reattiva richiesta Cr = Qr/(w*(V^2));%capacità richiesta [F]
Zcr = 1/(1i*w*Cr);
Z_2 = (Zc*Zcr)/(Zc+Zcr); V_2(i) =V*abs(Z_2/(Z_2+Zl));
Il(i) = abs(V/(Z_2+Zl));
end
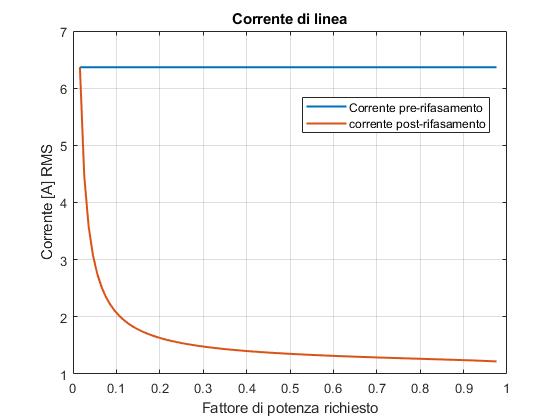
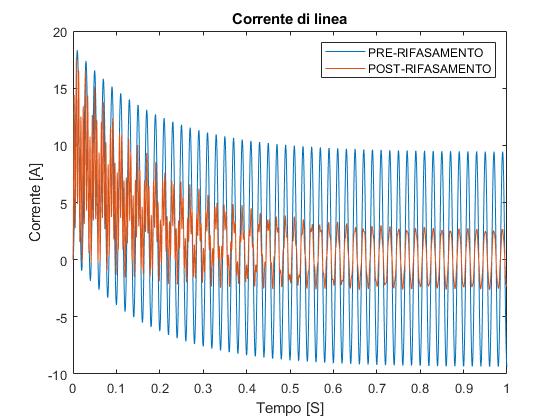
%corrente di linea pre-rifasamento
I= abs(V/(Zl+Zc))*ones(length(cos_phi_2),1);
plot(cos_phi_2,I,'LineWidth' ,1.5)
hold on
plot(cos_phi_2,Il,'LineWidth' ,1.5)
ylabel("Corrente [A] RMS")
xlabel("Fattore di potenza richiesto");
legend("Corrente pre-rifasamento","corrente post-rifasamento")
title("Corrente di linea")
grid on
figure
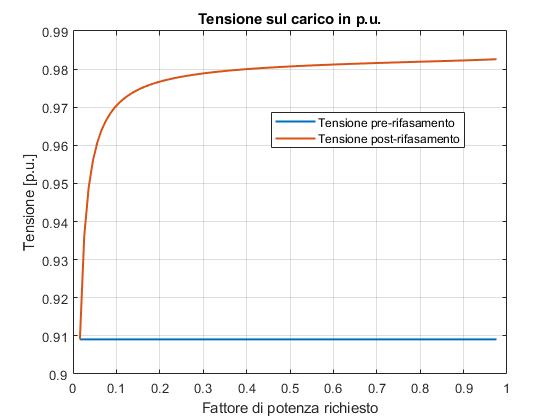
%tensione sul carico pre-rifasamento
VIN = (1/V)*abs(V(Zc/(Zc+Zl)))ones(length(cos_phi_2),1);
plot(cos_phi_2,VIN,'LineWidth' ,1.5)
hold on
plot(cos_phi_2,V_2/V,'LineWidth' ,1.5)
ylabel("Tensione [p.u]")
xlabel("Fattore di potenza richiesto");
legend("Tensione pre-rifasamento","Tensione post-rifasamento")
title("Tensione sul carico in p.u.")
grid on
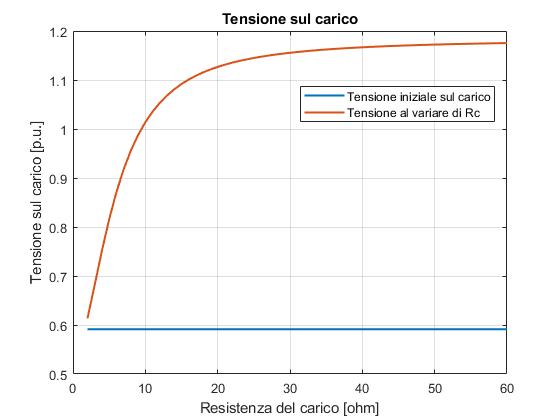
La corrente di linea, ovviemente si riduce all’aumentare del fattore di potenza finale. Di conseguenza diminuiscono le cadute sulla linea si riducono: ciò si traduce in un aumento della tensione sul carico:
La tensione base è la tensione nominale
Una volta rifasato, per ovvi motivi, il carico può variare. Il seguente grafico mostra come varia la tensione sul carico con l’aumentare della parte resistiva del carico:
La tensione nel grafico è normalizzata alla tensione nominale dell’impianti. Notare come aumentando il carico, fino ad esempio al distacco, la tensione in uscita supera la tensione in ingresso: si ha “effetto Ferranti”.
Tali grafici sono stati tracciati in condizione di regime, ovvero mediante il calcolo fasoriale. Durante le fasi transitorie però si hanno delle correnti piuttosto elevate: le correnti di inserzione.
Stupire con ricette complesse composte da molti ingredienti, paradossalmente, può risultare facile. Con pochi ingredienti, di contro, è assai complicato.
Si tratta di una vera e propria sfida: un dolce senza latte e uova.
INGREDIENTI
Acqua 330g (a temperatura ambiente);
Zucchero 200g;
Farina di grano tenero 300g;
Olio di semi di girasole 90g;
Lievito per dolci 16g;
Vaniglia (Bacca o Vanillina);
PREPARAZIONE TORTA
1. Versare lo zucchero nell’acqua e mescolare; 2.Aggiungere l’olio di semi; 3.Miscelare la farina con il lievito e la vaniglia (vanillina): setacciare la miscela ottenuta in modo da uniformare il tutto. 4.Versare la miscela appena ottenuta nell’acqua zuccherata, poco alla volta: mescolare a velocità sostenuta (sbattitore: velocità media); 5. Versare l’impasto ottenuto in una tortiera dopo aver “spennellato” la superficie interna con dell’olio di semi; 6.Cuocere in forno preriscaldato (statico) a 180*C per circa 50 minuti;
Una volta terminata la cottura (verificare la cottura col classico metodo dello stuzzicadenti). Lasciare nella “bocca del forno” per qualche minuto (forno spento ed aperto).
GLASSAAL CIOCCOLATO
300g cioccolato fondente;
150g zucchero;
150ml acqua;
Granella di nocciole;
1. Mescolare acqua e zucchero e portare ad ebollizione: per creare lo sciroppo; 2. Sciogliere il cioccolato a bagno maria; 3. Versare, mentre si sta mescolando, lo sciroppo nel cioccolato poco alla volta (quando diventa lucido l’emulsione è avviata); 4.Versare la granella di nocciole nella glassa;
Una volta ottenuta la glassa, ovviamente, versare sulla torta!
<<La corrente elettrica è uno dei più “spirituali” tra i fenomeni Fisici>> Giovanni Papini in “GOG”
L’elettrotecnica è lo studio della corrente elettrica e dei fenomeni ad essa associati e quindi lo studio delle applicazioni in cui essa viene trasportata e convertita. Il successo del “vettore corrente” è dovuto all’intrinseca longevità da esso presentata:
Elevata efficienza (rendimenti tendenti all’unità) nel trasporto (linee) e nella conversione in altre forme energetiche (meccanica, luminosa, termica);
Relativa semplicità (per la conoscenza tecnico-scientifica dell’essere umano) di conversione (produzione e utilizzazione);
Reversibilità (“Exergia”);
Nella Storia
Il fenomeno elettrico ha sempre affascinato l’essere umano, attribuendone la violenza all’ira degli Dei.
Già nel 1752 però, Benjamin Franklin dimostrò che i fulmini non sono altro che “scariche elettriche” tra nuvole e tra nuvole e terreno. Lo dimostò con il suo celebre esperimento dell’ “aquilone e la rana”.
La Disciplina vera è propria, nell’accezione moderna, nasce nel 1800 con l’invenzione della Pila da parte di Alessandro Volta. La pila infatti consentiva di accumulare un quantitativo di energia elettrica sufficiente allo svolgimento di esperimenti.
Alessandro Volta (Como 1745-Como 1827)
L’antenata della Pila di Volta fu la “Cella galvanica” (1780). Luigi Galvani è tra i padri di quella che oggi viene definita “Elettrochimica”: una reazione chimica (ossidoriduzione) fornisce corrente elettrica. Trasformazione da energia chimica ed elettrica (e viceversa). Galvani condusse molti esperimenti tra cui quello sulla stimolazione elettrica dei tessuti muscolari.
Osservò come una rana, nonostante decapidata e scuoiata, se sottoposta a stimolazione elettrica mostri delle contrazioni muscolari.
Luigi Galvani (Bologna 1737 – Bologna 1798)
Questi esperimenti portarono all’aperto contrasto tra Volta e Galvani stesso. Galvani, infatti, sosteneva l’esistenza dell'”elettricità animale”, ovvero ipotizzava che la corrente elettrica fosse “intrinseca” ai sistemi biologici. Che i corpi biologici fossero capaci di accumulare energia elettrica, come una Bottiglia di Leida. Volta invece sosteneva che i muscoli reagissero solamente ad una sollecitazione esterna, ovvero che funzionassero da “elettroscopio”.
Il principio proposto da Volta è il seguente: il “fluido elettrico” torna ad una condizione di equilibrio iniziale a fronte di una “tendenza” ad espandersi. Tale tendenza prende il nome di “tensione elettrica”: l’unità di misura della tensione,infatti, è il “Volt” [V].
Il nipote di Galvani, Giovanni Aldini, ripropose il medesimo esperimento della rana ma su cadaveri umani. Dovette trasferirsi in Inghilterra, ove era prevista anche la pena di morte per impiccagione, dunque senza decapitazione, potendo reperire “cadaveri integri”. Nel 1803 eseguì uno dei suoi esperimenti in pubblico, collegando il corpo umano ad una grande pila riuscendo a far muovere il cadavere. Sembra che il suo assistente morì di infarto la notte stessa a causa del terrore causatogli dall’esperimento: Aldini infatti bramava di poter “riportare in vita” i morti grazie all’elettricità. Questo ispirò (insieme agli esperimenti di Galvani) la scrittrice Mary Shelley per la scrittura del romanzo Frankenstein.
Nel 1825 Georg Ohm rese pubblica quella che era la sua convinzione, ovvero che la corrente che attraversa certi materiali è poporzionale alla differenza di potenziale elettrico su di essi applicata:
è sicuramente di ispirazione rammentare che il Padre di Ohm, che introdusse i figli alla Scienza, fu totalmente autodidatta.
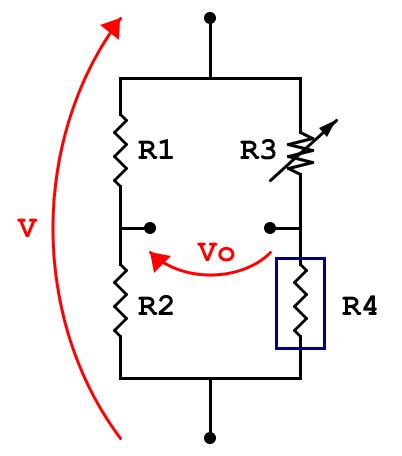
Nel 1833 Samuel Hunter Christie inventò un dispositivo per la misura delle resistenze elettriche, in seguito perfezionato da Charles Wheatstone, da cui prende il nome: ponte di Wheatstone.
Il ponte di Wheatstone è costituito da due rami formati a loro volta da due resistenze in serie. Una è la resistenza incognita, le altre tre sono note. Si varia (sempre con valori noti) una delle resistenze fino a che un galvanometro (strumento che traduce il passaggio di corrente elettrica in movimento magnetico) “segna zero”, la resistenza incognita può essere calcolata grazie a delle formule matematiche aventi per input solo il valore delle resistenze note.
Ponte di Wheatstone
Ipotizzando che le Resistenze R1 ed R2 siano note, R3 sia variabile tra valori noti, si vuole ricavare il valore di R4:
La tensione V0 è nulla (galvanometro che “segna zero”) se vale la seguente relazione:
Tale dispositivo misura pertanto lo “squilibrio” tra i due rami. Se si facesse uno studio dell’errore, si noterebbe che l’incertezza della tensione non contribuisce all’incertezza del risultato. Risulta dunque un metodo di misura molto accurato (è evidente che le tolleranze delle resistenze note devono essere più piccole possibile).
Lo studio dell’Elettrotecnica è, storicamente, lo studio dei circuiti elettrici a parametri concentrati, ovvero sistemi le cui dimensioni fisiche sono decisamente più piccole se comparate con le lungheze d’onda delle grandezze fisiche che lo interessano.
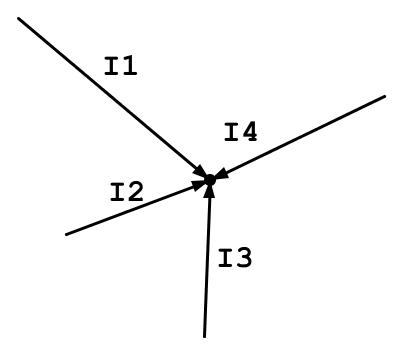
Tali circuiti hanno portato lo scienziato Gustav Robert Kirchhoff a considerazioni sulla conservazione della carica e dell’Energia: Leggi di Kirchhoff.
In un nodo, la somma algebrica delle correnti deve essere pari a zero (Prima legge di Kirchhoff), altrimenti vi sarebbe “accumulo”.
La seconda legge di Kirchhoff afferma invece che, dato un circuito elettrico, la sommatoria algebrica delle tensioni (f.e.m. e cadute di tensione) lungo un qualsiasi percorso chiuso, partendo da un nodo e tornando al nodo stesso, deve essere nulla. Il campo elettrico è dunque un campo conservativo.
Va rammentato inoltre il suo contributo nello studio delle “reti” intese come entità matematiche. Partendo da una rete, conoscendo il numero di rami e di nodi, è possibile calcolare il numero di configurazioni radiali da essa estraibile.
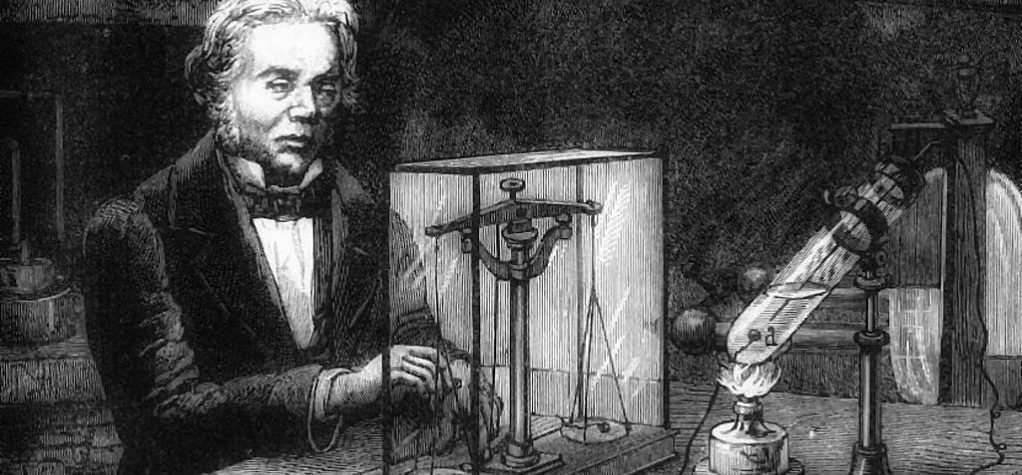
La legge di Michael Faraday , conosciuta anche come “legge dell’induzione elettromagnetica” (1831) introduce il concetto di conversione “a e da” altre altre forme di energia basato sul concetto di “moto”.
Michael Faraday ( Southwark 1791 – Hampton Court 1867 )
La forza elettromotrice “e” (f.e.m.) è pari alla variazione di flusso magnetico concatenato ad un circuito nel tempo. Il segno meno sta ad indicare che si tratta di un fenomeno inerziale, ovvero che si oppone alla causa che lo ha generato: le correnti legate alla f.e.m. sono tali da generare un flusso che si oppone alla causa della variazione stessa, in pratica tendono a mantenere il flusso magnetico costante. Questo fatto è spiegabile con il “principio di conservazione dell’energia”.
Le macchine elettriche funzionano grazie a tale principio. Le variazioni di flusso si traducono in differenze di potenziale mentre una corrente elettrica è associata ad un campo magnetico. I fenomeni magnetici ed elettrici sono interconnessi: da qui il nome “Elettromagnetismo”.
Tale rapporto “genetico” e “circolare” non ha attualmente altri riscontri: questa interconnessione così forte tra fenomeni fisici, consente di vedere qualcosa di complesso come qualcosa di semplice ed elegante che viene chiamata Natura.
Facendo variare il flusso concatenato con una spira si genera elettricità, facendo passare corrente sulla stessa spira viene generato un campo magnetico: reversibilità (Una macchina elettrica rotante, con i dovuti accorgimenti, può comportarsi sia da generatore che da motore).
Ulteriore analogia con altri settori scientifici è quella con l’idraulica: la corrente elettrica è un “flusso ordinato di cariche”. La portata di fluido che attraversa una tubazione è proporzionale alla pressione applicata (assonanza con la legge di Ohm) Galvani e Volta infatti parlavano del fenomeno elettricità come “flusso elettrico”.
Alla chiusura improvvisa di una valvola, a causa dell’inerzia della colonna d’acqua, si ha il “colpo d’ariete”: l’energia non può sparire e quindi viene “spesa” per la deformazione (a volte distruttiva) della tubazione stessa (onda d’urto) . L’equivalente elettrotecnico del colpo d’ariete è l’Arco Elettrico. All’apertura di un interruttore sui carichi induttivi vengono a generarsi delle sovratensioni che portano al superamento delle rigidità dielettriche degli isolanti causando la scarica (anch’essa distruttiva).
Per quanto riguarda proprio l’arco elettrico, a proporre il modello analitico (della relativa caratteristica statica) fu proposto da una ricercatrice nel 1902: Hertha Marks Ayrton.
Hertha Marks Ayrton ( Isola di Portsea 1854 – Lancingo 1923)
Macchine elettriche rotanti
Tra il 1830 e il 1840 fu costruita la prima carrozza elettrica: pertanto potremmo dire che l’automobile ha propulsione elettrica nasce prima di quella con motore a combustione interna. Il limite era rappresentato dalle baterie: la tecnologia dell’epoca non consentiva di costruire accumulatori con capacità sufficiente a garantire efficienza adeguata (Si ricorda che Volta inventò la Pila nel 1800).
Nel 1860, Antonio Pacinotti (basandosi sulla Legge di Faraday) inventa la Dinamo. Sino a quel momento l’energia elettrica veniva prodotta solo per mezzo di batterie (Pile). Nel 1869 osservò che lasciando “libera di ruotare” la manovella della Dinamo con cui caricava una batteria, questa si mire a ruotare: introdusse quindi il concetto di reversibilità. Inventò quindi il motore elettrico a corrente continua.
Antonio Pacinotti (Pisa 1841 – Pisa 1912)
Fondamentale è stata la scoperta del “campo magnetico rotante” da parte di Galileo Ferraris :
Campo magnetico equivalente (rosso) dato dalla somma di tre campi pulsanti (verdi)
Un avvolgimento percorso da una corrente alternata genera un campo magnetico pulsante. Se si alimenta una terna di avvolgimenti, i cui assi magnetici sono sfasati di 120°, con una terna di correnti simmetrica ed equilibrata (stesso modulo ma sfasate tra di loro di 120° elettrici) si ottiene un campo magnetico rotante.
Galileo Ferraris (Livorno Ferraris 1847 – Torino 1897)
Questo principio è alla base del funzionamento di motori/generatori trifase.
In verità il motore di Ferraris era Bifase. Nikola Tesla, nel 1888, brevettò il “motore ad induzione trifase”, ovvero un motore trifase per uso pratico a livello industriale. Nacque però una schermaglia scientifica per la paternità tra i due scienziati.
Nikola Tesla ( Smiljan 1856 – New York 1943)
Ferraris, a differenza di Tesla, divulgava e pubblicava tutte le sue scoperte per metterle a disposizione “della Patria e dell’Umanità”. Sembra infatti che George Westinghouse si interessò a Ferraris durante la ricerca di Ingegneri da assumere (siamo agli inizi della “Guerra delle correnti”). Questi però rifiutò perchè impegnato nel suo progetto di divulgazione della neo disciplina tramite la “Scuola Elettrotecnica” da egli fondata. L’industriale si rivolse poi a Tesla.
La lampadina
Probabilmente il simbolo per antonomasia dell’eletrotecnica è la lampadina. Benchè altri scienziati stessero lavorando su prototipi di lampadine ad incandescenza, fu Thomas Edison ad ideare una lampada ad incandescenza durevole che potesse essere prodotta e distribuita su larga scala. La lampadina ad incandescenza infatti è costituita da un conduttore inserito in un bulbo di vetro in cui viene creato il vuoto: il surriscaldamento provoca l’emissione di Fotoni (incandescenza). L’efficienza di tale dispositivo è pressoché minima, solo il 5% circa della potenza assorbita viene emessa nello spettro visibile, il resto può essere percepito dall’uomo solo come calore .
Thomas Alva Edison (Milan 1847 – West Orange 1931)
Al solito, la Storia è più complicata di quello che sembra. Anche il piemontese Alessandro Cruto sviluppò, nel 1880, il suo modello di lampadina, più efficiente di quella di Edison: quest’ultimo però nel 1879 aveva già innaugurato l’ulluminazione ad incandescenza illuminando Menlo Park.
Guerra delle Correnti
Le intuizioni di Galileo Ferraris, oltre che vere e proprie rivoluzioni scientifiche, contribuirono alla vittoria della corrente alternata sulla corrente continua in quella che venne definita come la “Guerra delle Correnti”.
Nel XIX secolo infatti vi fu una competizione economica di mercato tra due “modelli tecnici”: quello della Westinghouse Electric contro General Electric.
La General Electric, tra i cui fondatori c’è Thomas Edison, spingeva affinchè si affermasse sul mercato l’utilizzo della corrente continua. Al contrario, la Westinghouse, sulla base delle scoperte di Galileo Ferraris e Nikola Tesla, propose l’utilizzo della corrente alternata.
La distribuzione in continua, che era a 110V, si rilevò presto inefficace a causa delle enormi perdite sulle linee e il livello di tensione “ottenibile per la grande distribuzione” troppo basso.
L’enorme praticità di sfruttamento delle teorie di Ferraris e Tesla fecero il resto.
Topsy
Il 4 gennaio 1903, Edison e la General Electric vollero dimostrare che la corrente continua è “meno pericolosa” di quella alternata.
Topsy
Topsy era un esemplare femmina di elefante indiano. “Inadatto” (come ogni animale) alla vita in cattività, disobbediente e apparentemente pericoloso, fu “giustiziato” tramite elettrocuzione. Falliti altri tentativi di soppressione (strangolamento, cianuro…) si decise di utilizzarlo come cavia per dimostrare la percolosità della corrente alternata. La bestia si rifiutò di salire sulla piattaforma (patibolo) allestita per l’occasione, pertanto si decise di spostare l’attrezzatura. 6600v AC per dieci secondi….
Un motore elettrico è costituito da ferro e rame. La taglia è legata alla coppia nominale. La scrittura dell’equazione di coppia passa attraverso il principio ci conservazione dell’energia.
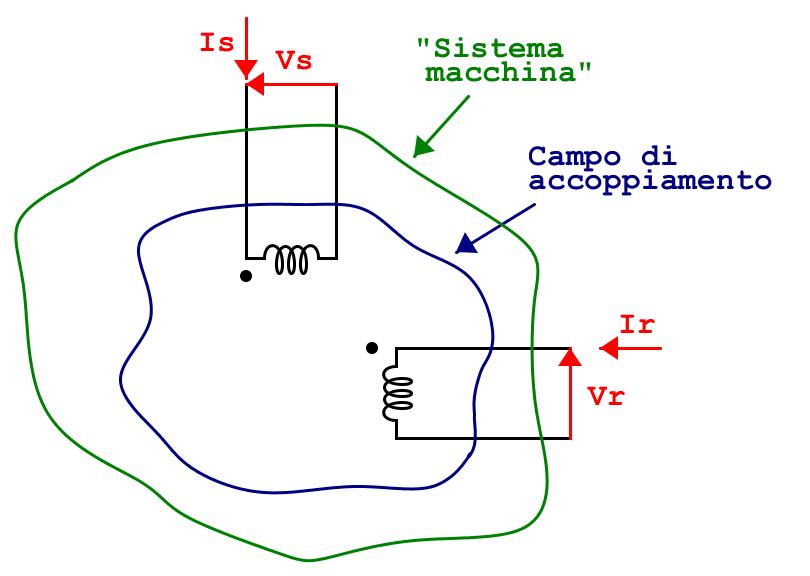
Macchina generalizzata
Eseguendo quindi un bilancio energetico:
Ove
= vatriazione di energia elettrica
= vatriazione di energia meccanica
= vatriazione di energia termica (effetto Joule)
= vatriazione di energia magnetica
Trattandosi di avvolgimenti si può scrivere la seguente identità che lega le tensioni con le correnti e i flussi:
Si tratta di scritture matriciali . Per semplificare la scrittura delle formule mi si conceda, alla guisa di lienza poetica, di omettere la notazione matriciale. Tutti i termini dell’equazioni sono infatti matrici (le cui dimensioni sono legate al numero di avvolgimenti di rotore e di statore).
Generalmente, per questioni di simmetria, la matrice delle resistenze “R” collassa in uno scalare. Non ha senso infatti parlare di resistenze mutue, dunque fuori dalla diagonale si hanno tutti termini nulli. Si tratterebbe di una matrice diagonale con elementi, queli non nulli sulla diagonale, tutti uguali pari alla resistenza degli avvolgimenti. Rimanendo formali potremmo scrivere uno scalare che moltiplica una matrice identità.
Per quanto riguarda la matrice delle induttanze “L”, invece, non può essere rappresentata da uno scalare ma viene costruita tenendo presente le isotropie e anisoptropie della macchina, ovvero se le induttanze dipendono dalla posizione del rotore o meno. Più avanti verrà approfondito tale aspetto.
Dove è l’angolo meccanico tra gli assei magnetici di starore e rotore.
La derivata nel tempo di è una derivata di una “funzione di funzione”. Pertanto vige la “regola della catenaria” per le derivate:
Le variazioni di energia possono essere scritte come segue:
Quindi:
Il termine ” ” al primo termine si elide con quello del secondo: questo sugerisce che le perdite Joule sono ” a carico del generatore”.
Dividendo per “dt”:
Date le matrici A e B:
Per la precedente proprietà delle matrici e accennando al fatto che si dimostra che:
L’equazione di coppia “generalizzata” è la seguente:
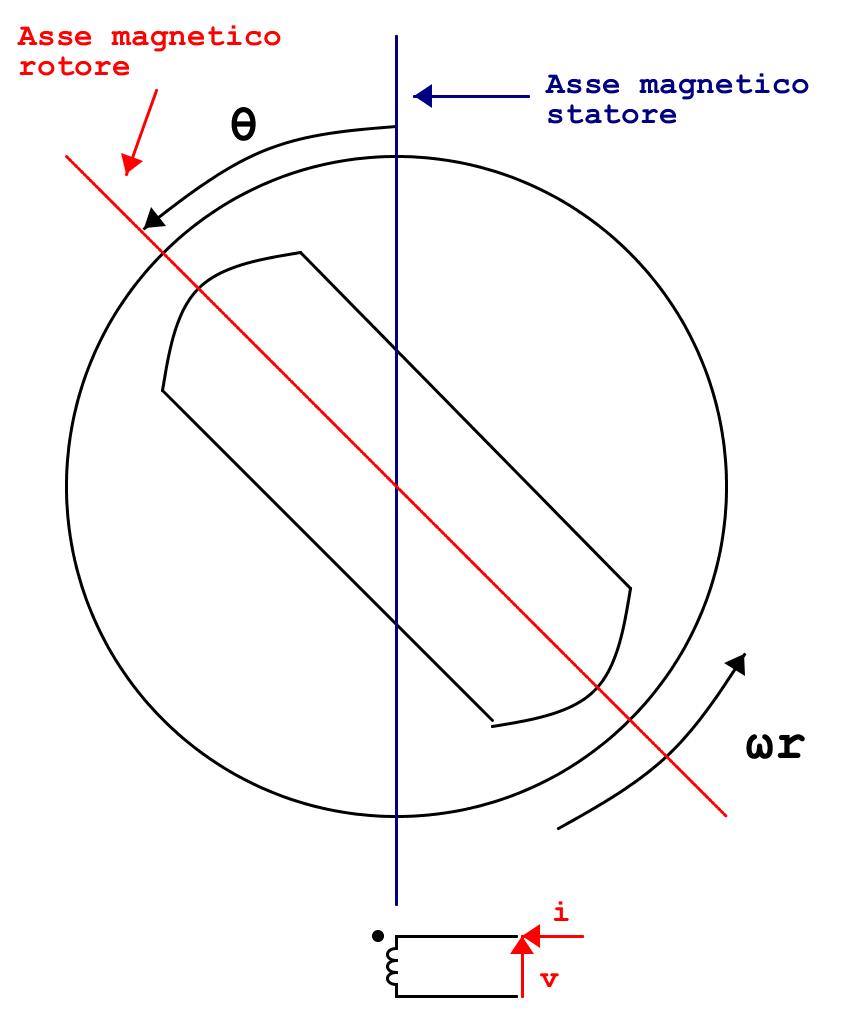
Macchina monofase a riluttanza
Si tratta di una delle macchine concettualmente più semplici che si possano ideare. Un avvolgimento di statore e un rotore senza magneti ne avvolgimenti: la coppia è dovuta all’anisotropia.
L’isotropia, in Fisica, è l’indipendenza di una proprietà dalla direzione considerata, In questo caso per isotropia si intende una NON dipendenza dell’induttanza dalla posizione del rotore (angolo ).
Macchina monofase a riluttanza
Il modello dinamico della macchina è il seguente:
ove
L’induttanza, a causa della forma del rotore, è funzione di , si ha anisotropia. Si può parametrizzare come segue:
Andamento induttanza in funzione della posizione
Innanzitutto si nota che la funzione è approssimabile con un coseno con periodicità .
Quindi:
Pertanto:
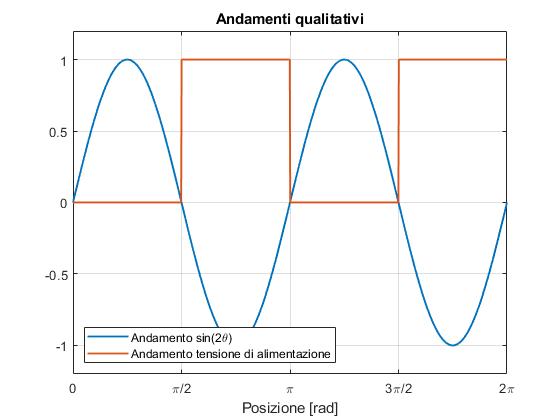
La prima considerazione che si può fare è che la direzione della coppia non dipende dal segno della corrente in quanto essa compare elevata al quadrato. Per avere coppia media positiva occorre alimentare opportunatamente la macchina dando corrente solo in determinate posizioni.
Occorre alimentare solo quando si ha la seguente condizione:
Si tratta quindi di una macchina sincrona in cui bisogna necessariamente conoscere la posizione del rotore per potere attuare un controllo.
Se al momento dell’avvio il rotore si trova in quadratura con lo statore, non vi è alcuna possibilità di far partire la macchina.
Pertanto si può pompare tutta la corrente che si riesce senza riuscire a muovere nulla.
L’ingegnere britannico Sebastian Ziani de Ferranti osservò che durante la notte , quindi in condizioni di basso carico, le tensioni ai nodi della rete elettrica londinese erano maggiori di quelle impresse. Tale fenomeno, ormai noto, prende il nome di “Effetto Ferranti” . Per trattare tale fenomeno è necessario fare una breve riassunto della teoria delle linee elettriche.
Linee elettriche
Una line alettrica consente di trasportare energia elettrica tra due punti. L’elevata efficienza di questo traferimento spiega la diffusione del vettore elettrico come principale forma di energia.
S =
R=
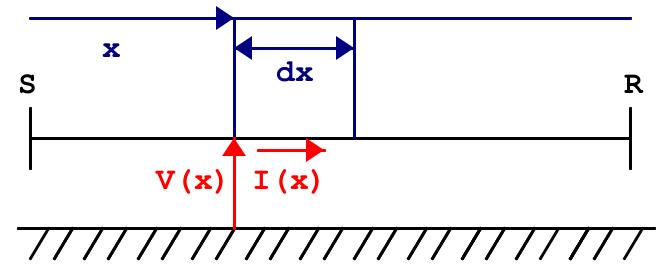
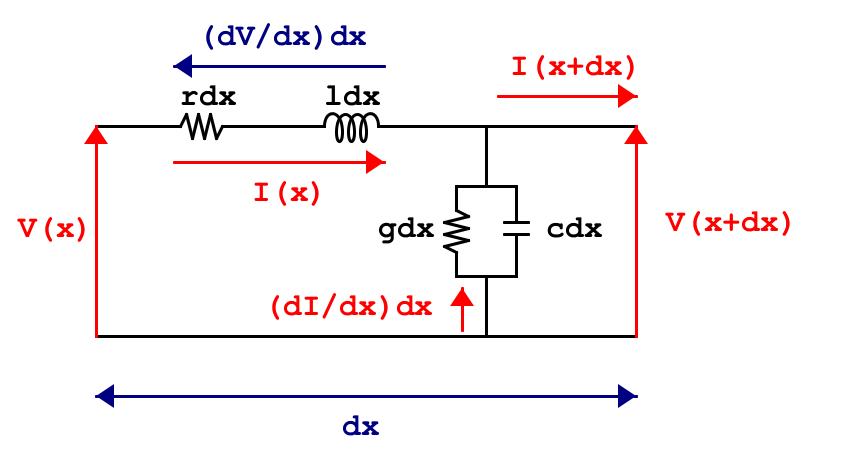
La generica “cella elementare” di una linea, ovvero relativa al tratto “dx”, è il seguente:
Cella elementare della linea
Resistenza di linea “r”
La resistenza di un conduttore lungo “l” è di sezione “S”:
Bisogna rammentare che la resistenza di un conduttore in DC non coincide con quella in AC. Tale fenomeno è conosciuto come “effetto pelle”. A causa delle interazioni tra campo magnetico (esterno ed interno) e le cariche, quest’ultime vengono spinte verso la periferia del conduttore con conseguente diminuzione della sezione utile. Questo si traduce in un umento di resistenza.
La variazione di resistenza, legata alla frequenza, è legata al rapporto tra “spessore di penetrazione” e sezione del conduttore :
All’aumentare della frequenza diminuisce lo spessore di penetrazione e quindi la resistenza AC tende ad avvicinarsi a quella DC. Viceversa, all’aumentare della resistività lo spessore di penetrazione aumenta e quindi la resistenza AC tende ad essere sempre più grande rispetto a quella in DC.
Conduttanza di linea “g” Legata alla corrente che si disperde radialmente nei conduttori e all’effetto corona. L’effetto corono è dovuto ad una ionizzazione dell’aria intorno al conduttore, si aprono canali ionizzati che consentono il passaggio di cariche. L’accelerazione delle particelle fa si che queste emettano onde elettromagnetiche anche nello spettro visibile causando una suggestiva “illuminazione dell’aria”. Ovviamente l’arco elettrico si estingue al passaggio per lo zero della tensione che, a 50Hz avviene 100 volte al secondo: questo fa si che si abbia anche una modulazione audio nello spettro udibile, ecco spiegato il classico ronzio. Ovviamente l’effetto pelle è dissipativo oltre che causa di distorsioni di tensioni e correnti.
Capacità di linea “c”
Il sistema conduttore-isolante-conduttore è per definizione un conduttore. Per tali motivi si hanno accoppiamenti capacitivi fase-fase e fase-terra. La corrente che interessa tali fenomeni sarà quindi una corrente di spostamento.
Induttanza lineica “l” Dovuta ai concatenamenti di campi esterni ed interni al conduttore.
Equazioni
Dallo schema della cella elementare si può scrivere quanto segue (si utilizza la convenzione dei generatori) :
La corrente è sostenuta quindi dalle perdite e dagli effetti capacitivi. Si tratta di equazioni differenziali alle derivate parziali analoghe, pertanto tensione e corrente avranno lo stesso andamento lungo la linea.
I parametri r,c,g e l sono indipendenti da x. Pertanto si può scrivere:
Dove viene definita come costante di propagazione e viene espressa in :
Il contenuto informativo di gamma è contenuto nella parte immaginaria in quanto decisamente maggiore della parte reale.
Una soluzione è
Le costanti A e B vengono calcolate dalle condizioni al contorno, ovvero :
Dove “a” è la lunghezza della linea. Inoltre si difinisce l'”impedenza caratteristica della linea”
Quindi i parametri A e B diventano:
Eseguendo una sostituzione e ragionando in termini trigonometrici (si rammenta che le funzioni trigonometriche con argomenti complessi diventano funzioni iperboliche):
Doppio bipolo
La linea è quindi rappresentabile come un doppio bipolo avente la matrice di trasmissione :
Si può approssimare la linea come “linea senza perdite”, ovvero se sono valide le seguenti ipotesi:
Quindi ne risulta che la costante di propagazione e l’impedenza caratteristica valgono:
L’impedenza caratteristica non dipende più dalla pulsazione.
Ricordando le relatrioni trigonometriche tra funzioni inperboliche e non:
Pertanto, in una linea senza perdite, si avrà la seguente relazione:
Le tensioni e le correnti sono quindi “onde”. Fissato un punto della linea in quel punto è possibile calcolare gli andamenti spaziali, mentre fissato un istante di tempo è possibile calcolare l’ampiezza istantanei in qualunque punto della linea.
Diretta e inversa. La linea può essere studiata indifferentemente partendo da un estremo o un’altro.
L’ipotesi del sistema a costanti compatte decade quando le lunghezze d’onda dei fenomeni sono compatibili con le dimensioni geometriche. Definendo quindi la velocità di propagazione :
La lunghezza d’onda è definita come:
Sovratensioni in uscita
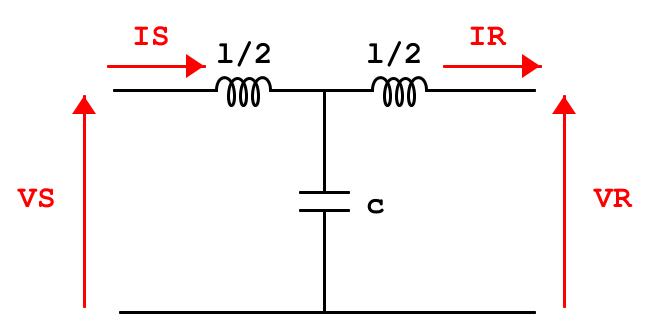
Come detto, la sovratensione in uscita si osserva in caso di basso carico in uscita. Il caso peggiore è dunque la linea a vuoto (IR = 0). Utilizzando la matrice di trasmissione delle linee senza perdite, si può scrivere quindi:
Eseguendo lo svuluppo in serie della funzione coseno, tagliata al secondo ordine:
Da cui si può scrivere:
Risulta evidente come tale scrittura descriva un partitore L-C:
schema descritto dalla precendente formula
Dove “a” è la lunghezza della linea. La tensione di uscita in funzione della tensione di ingresso (ricordando che IR=0) è pari a :
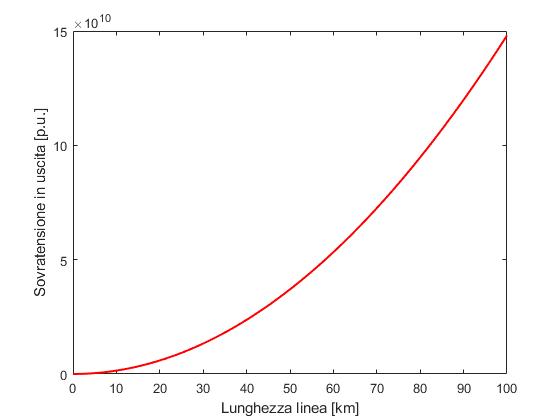
Prendendo come valore base proprio VS, la sovratensione (in p.u.) è data da:
Notare come tale effetto si accentui all’aumentare della lunghezza della linea. Le linee in cavo presentano capacità maggiori rispetto alle linee aeree pertanto le sovratensioni saranno più marcate.
Quest’ultimo aspetto diventa critico in presenza di “sovrarifasamento”. Una volta che (per vari motivi) il carico varia o viene diaconnesso, la rete vedrà soltanto il condensatore per il rifasamento: carico fortemente capacitivo che provoca, per effetto Ferranti, una sovratensione.
Di origini meridionali, sono probabilmente una delle pietanze più apprezzate e diffuse. Si tratta di una ricetta piuttosto elementare ma che non ammette errori, pena la totale disfatta culinaria! La quantità di farina, il tempo di bollitura delle patate e della cottura stessa sono piuttosto critici.
Partiamo col dire che l’uovo non fa parte della ricetta: il suo utilizzo infatti è dovuto alla sua funzione di “collante”. Personalmente lo trovo piuttosto inelegante oltre che eccessivamente impattante sul sapore finale.
Inoltre va notato che la pasta all’uovo presenta un tempo di cottura differente rispetto allo gnocco “tradizionale” (farina e patate). Questo comporta una cottura non uniforme all’interno dello gnocco stesso.
INGREDIENTI
Patate
Le patate devono essere “vecchie” , ovvero farinose e meno umide, in modo tale da ottimizzare la fase di lavorazione.
Devono avere tutte le stesse dimensioni così da garantire uno stato uniforme della cottura.
Non devono avere germogli e devono essere integre.
Farina
Anche la normale fanina “00” porta a buoni risultati;
Proporzioni
Il rapporto in peso tra farina e patate presenta una finestra di valori non troppo stretta.
1kg di patate necessita di 250/300g di farina.
Per i più “accademici” il quantitativo di farina necessarie è circa il 20%-30% del peso delle patate.
Modalità di preparazione
Far bollire le patate (con la boccia) in acqua fredda e abbondante, introducendole nella pentola dall’inizio (quando l’acqua è ancora fredda) . Il tempo di cottura è legato alle dimensioni dei tuberi ma , in genere, è sufficiente contare dai 40′ ai 60′ dall’inizio dell’ebbollizione. Per verificarne lo stato si può eseguire un “controllo meccanico” verificando (con una forchetta) la facilità con cui le patate vengono penetrate: se si penetrano facilmente sono pronte.
Sbucciare le patate e schiacciarle quando sono ancora calde (si consiglia uno schiacciapatate) . Lasciar raffreddare leggermente.
Impastare con la farina tenendo presente che più si lavorano più l’amido viene attivato rendendo gli gnocci gommosi. Lavorare quindi il meno possibile.
Creare dei “cilindri” (le dimensioni sono legate al condimento e al risultato che si vuole ottenere: rammentare che più sono piccoli più è facile ottenere una cottura uniforme ma è più facile “superare” lo stato di cottura ottimale).
Cuocere in acqua abbondante e abbondantemente salata: si ricordi che il tempo di cottura è assai breve mentre l’assorbimento di sale è piuttosto lento. Tenendo a mente questo fattore è opportuno essere generosi con il sale!
Come la Tradizione vuole, “quando vengono a galla sono pronti”!
Conservazione
Gli gnocchi vanno preparati non prima di due ore prima di cuocerli. Ad ogni modo, rammentare che nell’asciugarsi tendono a diventare sempre più duri una volta cotti.
Se si intende congelarli, farli riposare per almeno 20′ prima di metterli in congelatore. In seguito però andranno cotti senza essere scongelati.
Suggerimenti per il condimento
Burro e salvia potrebbe rivelarsi un importante cavallo di battaglia . Far sciogliere il burro nella padella e aggiungere del pepe nero e qualche foglia di salvia, tenendo presente che quest’ultima è assai saporita, ergo, non si esageri. In seguito, mantecarvi a fuoco lento gli gnocchi e aggiungere del parmigiano o del pecorino.
Valori nutrizionali
I valori nutrizionali, orientativi e sovrastimati, per una porzione di 150g sono:
Kcalorie = 317;
Carboidrati = 41g;
Grassi = 17g;
Proteine = 5g;
N.B. Tali valori sono stati calcolati sulla base di “medie di valori nutrizionali” dei singoli componenti trovati in rete. Pertanto non hanno voalenza scientifica.










 e rimane nella posizione “r=0” per un tempo pari a
e rimane nella posizione “r=0” per un tempo pari a  . Il periodo in esame sarà dunque :
. Il periodo in esame sarà dunque :

 :
: ” lo si considera come prodotto di funzioni ortonormali. In tal caso, l’integrale del prodotto è pari al prodotto degli integrali.
” lo si considera come prodotto di funzioni ortonormali. In tal caso, l’integrale del prodotto è pari al prodotto degli integrali.
















![F(x) = \frac{a0}{2}+\sum\limits_{h = 1}^{\infty} [ \frac{ah}{2} *cos(hx)+ \frac{bh}{2} *sin(hx) ]](https://s0.wp.com/latex.php?latex=F%28x%29+%3D+%5Cfrac%7Ba0%7D%7B2%7D%2B%5Csum%5Climits_%7Bh+%3D+1%7D%5E%7B%5Cinfty%7D+%5B+%5Cfrac%7Bah%7D%7B2%7D+%2Acos%28hx%29%2B++%5Cfrac%7Bbh%7D%7B2%7D+%2Asin%28hx%29+%5D&bg=ffffff&fg=424242&s=0&c=20201002)


 [va]
[va] [w]
[w] [var]
[var]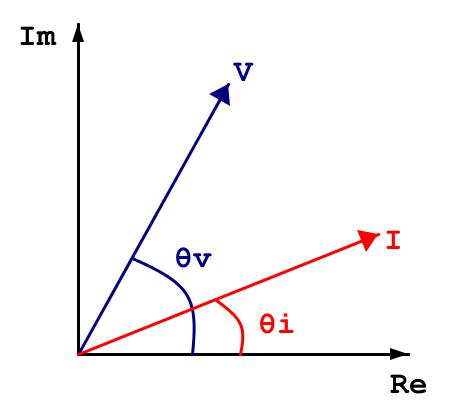
 si ha:
si ha:

![cos(\alpha) cos(\beta) = \frac{1}{2}[cos(\alpha-\beta)+cos( \alpha+\beta )]](https://s0.wp.com/latex.php?latex=cos%28%5Calpha%29++cos%28%5Cbeta%29+%3D+%5Cfrac%7B1%7D%7B2%7D%5Bcos%28%5Calpha-%5Cbeta%29%2Bcos%28+%5Calpha%2B%5Cbeta+%29%5D+&bg=ffffff&fg=424242&s=0&c=20201002)

![p(t) = v(t)*i(t)=2VI\frac{1}{2}[ cos( \theta_v - \theta_i)+ cos(2\omega t + \theta_v+ \theta_i ) ]](https://s0.wp.com/latex.php?latex=p%28t%29+%3D+v%28t%29%2Ai%28t%29%3D2VI%5Cfrac%7B1%7D%7B2%7D%5B+cos%28+%5Ctheta_v+-+%5Ctheta_i%29%2B+cos%282%5Comega+t+%2B++%5Ctheta_v%2B+%5Ctheta_i+%29++%5D&bg=ffffff&fg=424242&s=0&c=20201002)
 , il valor medio della
, il valor medio della  vale:
vale:
 e corrente reattiva
e corrente reattiva  . Considerando che la corrente è in ritardo(sul carico reattivo) sulla tensione:
. Considerando che la corrente è in ritardo(sul carico reattivo) sulla tensione:


 può essere scritta come somma dei termini reattivo ed attivo:
può essere scritta come somma dei termini reattivo ed attivo:![p(t) = v(t)*i(t)=v(t)[ i_a(t) + i_r(t) ]](https://s0.wp.com/latex.php?latex=p%28t%29+%3D+v%28t%29%2Ai%28t%29%3Dv%28t%29%5B+i_a%28t%29+%2B+i_r%28t%29+%5D&bg=ffffff&fg=424242&s=0&c=20201002)
![p_a(t) = VIcos(\phi)[1+VIcos(2\omega t + 2 \theta_v )]](https://s0.wp.com/latex.php?latex=p_a%28t%29+%3D+VIcos%28%5Cphi%29%5B1%2BVIcos%282%5Comega+t+%2B+2+%5Ctheta_v+%29%5D&bg=ffffff&fg=424242&s=0&c=20201002)

 è unidirezionale, dipendente dal segno di
è unidirezionale, dipendente dal segno di  .
.










 concatenato ad un circuito nel tempo. Il segno meno sta ad indicare che si tratta di un fenomeno inerziale, ovvero che si oppone alla causa che lo ha generato: le correnti legate alla f.e.m. sono tali da generare un flusso che si oppone alla causa della variazione stessa, in pratica tendono a mantenere il flusso magnetico costante. Questo fatto è spiegabile con il “principio di conservazione dell’energia”.
concatenato ad un circuito nel tempo. Il segno meno sta ad indicare che si tratta di un fenomeno inerziale, ovvero che si oppone alla causa che lo ha generato: le correnti legate alla f.e.m. sono tali da generare un flusso che si oppone alla causa della variazione stessa, in pratica tendono a mantenere il flusso magnetico costante. Questo fatto è spiegabile con il “principio di conservazione dell’energia”. 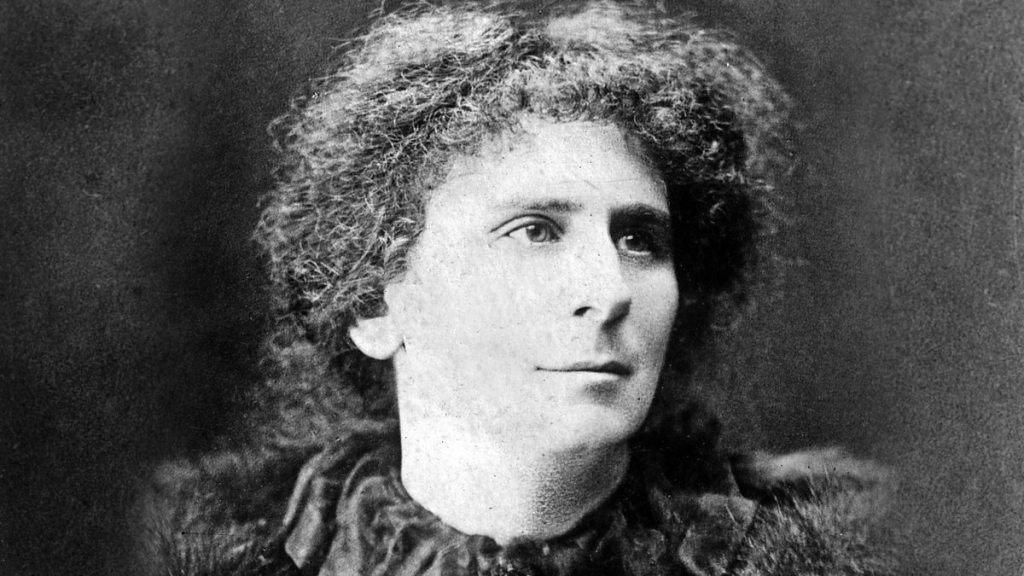


 = vatriazione di energia elettrica
= vatriazione di energia elettrica = vatriazione di energia meccanica
= vatriazione di energia meccanica = vatriazione di energia termica (effetto Joule)
= vatriazione di energia termica (effetto Joule) = vatriazione di energia magnetica
= vatriazione di energia magnetica

 è l’angolo meccanico tra gli assei magnetici di starore e rotore.
è l’angolo meccanico tra gli assei magnetici di starore e rotore.








 ” al primo termine si elide con quello del secondo: questo sugerisce che le perdite Joule sono ” a carico del generatore”.
” al primo termine si elide con quello del secondo: questo sugerisce che le perdite Joule sono ” a carico del generatore”. 



 si dimostra che:
si dimostra che:





 , si ha anisotropia. Si può parametrizzare
, si ha anisotropia. Si può parametrizzare  come segue:
come segue: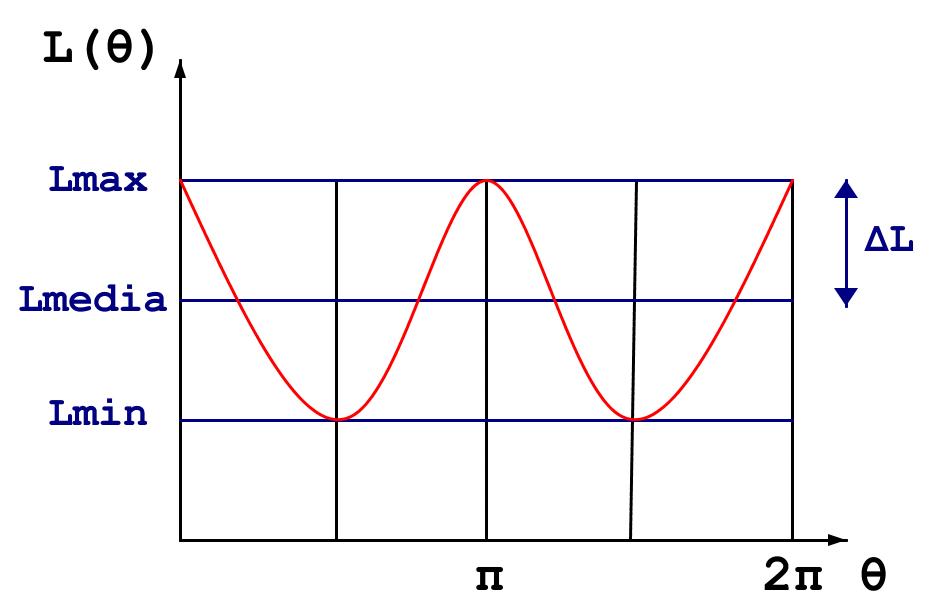
 .
.





 e sezione del conduttore
e sezione del conduttore  :
:


 è sostenuta quindi dalle perdite e dagli effetti capacitivi. Si tratta di equazioni differenziali alle derivate parziali analoghe, pertanto tensione e corrente avranno lo stesso andamento lungo la linea.
è sostenuta quindi dalle perdite e dagli effetti capacitivi. Si tratta di equazioni differenziali alle derivate parziali analoghe, pertanto tensione e corrente avranno lo stesso andamento lungo la linea.
 viene definita come costante di propagazione e viene espressa in
viene definita come costante di propagazione e viene espressa in ![[m^{-1}]](https://s0.wp.com/latex.php?latex=%5Bm%5E%7B-1%7D%5D&bg=ffffff&fg=424242&s=0&c=20201002) :
:



![[Z_0]](https://s0.wp.com/latex.php?latex=%5BZ_0%5D&bg=ffffff&fg=424242&s=0&c=20201002)




![\mathbf{V}(x)= cosh[\gamma (a-x)] \mathbf{V_R } + \mathbf {Z_0 } sinh[ \gamma (a-x)] ] \mathbf{I_R }](https://s0.wp.com/latex.php?latex=%5Cmathbf%7BV%7D%28x%29%3D+++cosh%5B%5Cgamma+%28a-x%29%5D++%5Cmathbf%7BV_R+%7D+%2B++%5Cmathbf+%7BZ_0+%7D++sinh%5B+%5Cgamma+%28a-x%29%5D+%5D++++%5Cmathbf%7BI_R+%7D++&bg=ffffff&fg=424242&s=0&c=20201002)
![\mathbf{I}(x)= \frac{ sinh[\gamma (a-x)] }{ \mathbf {Z_0 } }\mathbf{V_R } + \mathbf {Z_0 } cosh[ \gamma (a-x)] ] \mathbf{I_R }](https://s0.wp.com/latex.php?latex=%5Cmathbf%7BI%7D%28x%29%3D++%5Cfrac%7B+sinh%5B%5Cgamma+%28a-x%29%5D++%7D%7B+%5Cmathbf+%7BZ_0+%7D+%7D%5Cmathbf%7BV_R+%7D+%2B++%5Cmathbf+%7BZ_0+%7D++cosh%5B+%5Cgamma+%28a-x%29%5D+%5D++++%5Cmathbf%7BI_R+%7D++&bg=ffffff&fg=424242&s=0&c=20201002)
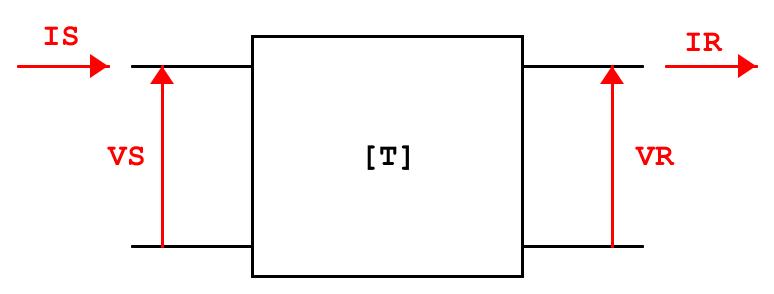
![[T]](https://s0.wp.com/latex.php?latex=%5BT%5D&bg=ffffff&fg=424242&s=0&c=20201002) :
:![[T] = \begin {bmatrix} cosh(\gamma a) & \mathbf {Z_0 } sinh( \gamma a) \\[6pt] \frac{sinh(\gamma a) }{ \mathbf {Z_0 } } & cosh(\gamma a) \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5BT%5D+%3D++++%5Cbegin++%7Bbmatrix%7D++cosh%28%5Cgamma+a%29++%26+%5Cmathbf+%7BZ_0+%7D++sinh%28+%5Cgamma++a%29++%5C%5C%5B6pt%5D+++%5Cfrac%7Bsinh%28%5Cgamma+a%29+%7D%7B+%5Cmathbf+%7BZ_0+%7D++%7D+%26++cosh%28%5Cgamma+a%29++++++%5Cend%7Bbmatrix%7D+&bg=ffffff&fg=424242&s=0&c=20201002)
![\begin {bmatrix} \mathbf{V_S } \\[6pt] \mathbf{I_S } \end{bmatrix} = \begin {bmatrix} T \end{bmatrix} \begin {bmatrix} \mathbf{V_R } \\[6pt] \mathbf{I_R } \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5Cbegin++%7Bbmatrix%7D+++%5Cmathbf%7BV_S+%7D+++%5C%5C%5B6pt%5D+++%5Cmathbf%7BI_S+%7D++%5Cend%7Bbmatrix%7D++%3D+++%5Cbegin++%7Bbmatrix%7D+++T++++++%5Cend%7Bbmatrix%7D++%5Cbegin++%7Bbmatrix%7D+++%5Cmathbf%7BV_R+%7D+++%5C%5C%5B6pt%5D+++%5Cmathbf%7BI_R+%7D++%5Cend%7Bbmatrix%7D++&bg=ffffff&fg=424242&s=0&c=20201002)






![[T] = \begin {bmatrix} cos(\theta ) & j\mathbf {Z_0 } sin( \theta ) \\[6pt] \frac{j sin(\theta ) }{ \mathbf {Z_0 } } & cos(\theta ) \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5BT%5D+%3D++++%5Cbegin++%7Bbmatrix%7D++cos%28%5Ctheta+%29++%26+j%5Cmathbf++%7BZ_0+%7D++sin%28+%5Ctheta++%29++%5C%5C%5B6pt%5D+++%5Cfrac%7Bj+sin%28%5Ctheta+%29+%7D%7B+%5Cmathbf+%7BZ_0++%7D++%7D+%26+++cos%28%5Ctheta+%29+++++++%5Cend%7Bbmatrix%7D+&bg=ffffff&fg=424242&s=0&c=20201002)

 :
:
 è definita come:
è definita come: