Un motore elettrico è costituito da ferro e rame. La taglia è legata alla coppia nominale. La scrittura dell’equazione di coppia passa attraverso il principio ci conservazione dell’energia.
Eseguendo quindi un bilancio energetico:

Ove
-
= vatriazione di energia elettrica
-
= vatriazione di energia meccanica
-
= vatriazione di energia termica (effetto Joule)
-
= vatriazione di energia magnetica
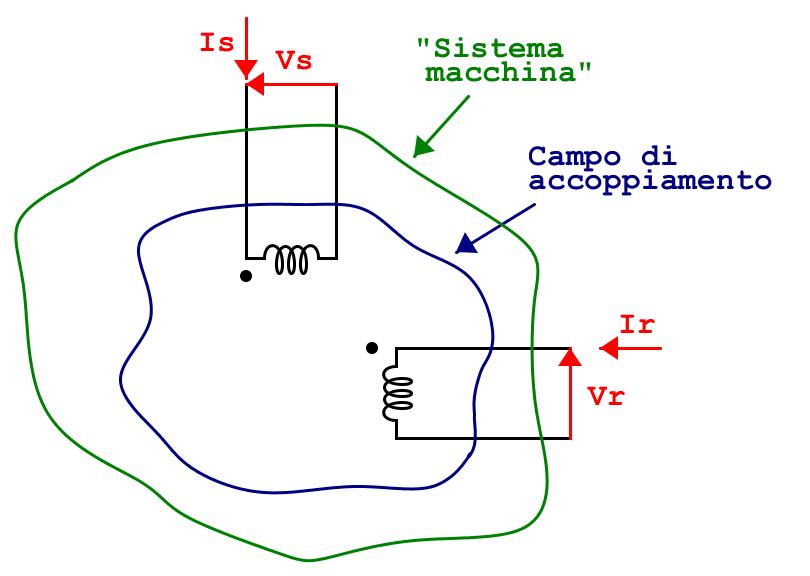
Trattandosi di avvolgimenti si può scrivere la seguente identità che lega le tensioni con le correnti e i flussi:

Si tratta di scritture matriciali . Per semplificare la scrittura delle formule mi si conceda, alla guisa di lienza poetica, di omettere la notazione matriciale. Tutti i termini dell’equazioni sono infatti matrici (le cui dimensioni sono legate al numero di avvolgimenti di rotore e di statore).
Generalmente, per questioni di simmetria, la matrice delle resistenze “R” collassa in uno scalare. Non ha senso infatti parlare di resistenze mutue, dunque fuori dalla diagonale si hanno tutti termini nulli. Si tratterebbe di una matrice diagonale con elementi, queli non nulli sulla diagonale, tutti uguali pari alla resistenza degli avvolgimenti. Rimanendo formali potremmo scrivere uno scalare che moltiplica una matrice identità.
Per quanto riguarda la matrice delle induttanze “L”, invece, non può essere rappresentata da uno scalare ma viene costruita tenendo presente le isotropie e anisoptropie della macchina, ovvero se le induttanze dipendono dalla posizione del rotore o meno. Più avanti verrà approfondito tale aspetto.
Dove 
La derivata nel tempo di 


Le variazioni di energia possono essere scritte come segue:




Quindi:



Il termine ” 

Dividendo per “dt”:


Date le matrici A e B:

Per la precedente proprietà delle matrici e accennando al fatto che 

L’equazione di coppia “generalizzata” è la seguente:

Macchina monofase a riluttanza
Si tratta di una delle macchine concettualmente più semplici che si possano ideare. Un avvolgimento di statore e un rotore senza magneti ne avvolgimenti: la coppia è dovuta all’anisotropia.
L’isotropia, in Fisica, è l’indipendenza di una proprietà dalla direzione considerata, In questo caso per isotropia si intende una NON dipendenza dell’induttanza dalla posizione del rotore (angolo
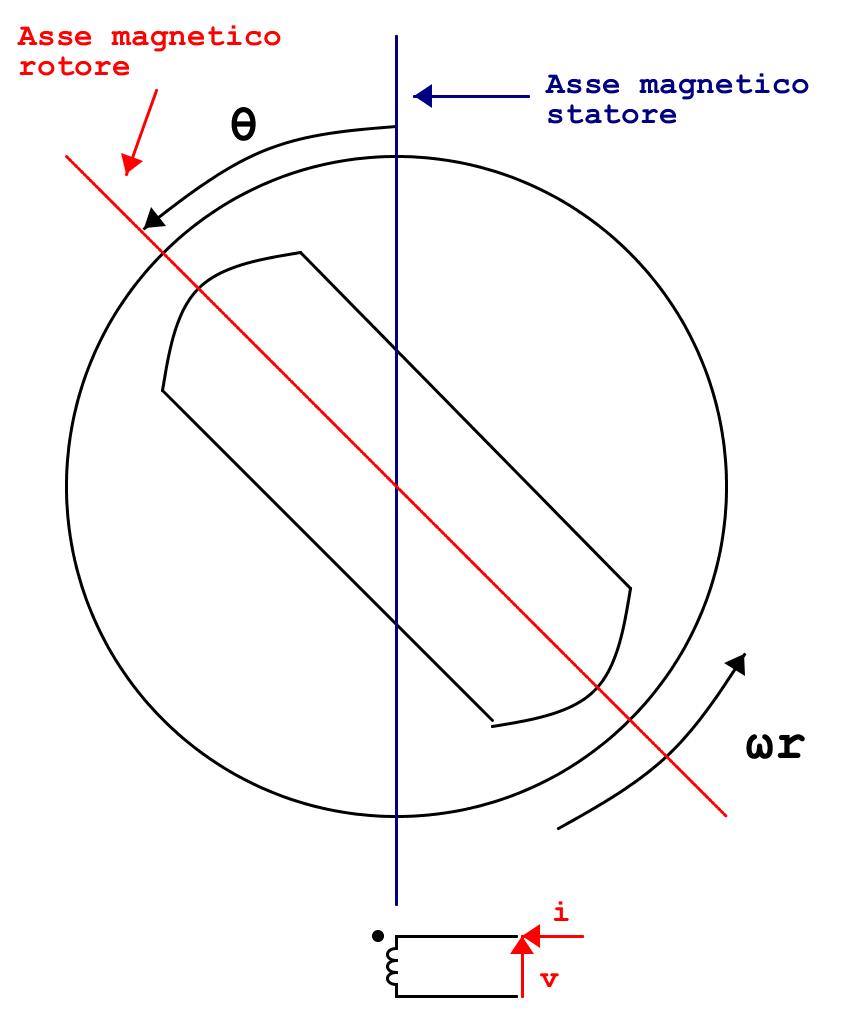
Il modello dinamico della macchina è il seguente:

ove



L’induttanza, a causa della forma del rotore, è funzione di 

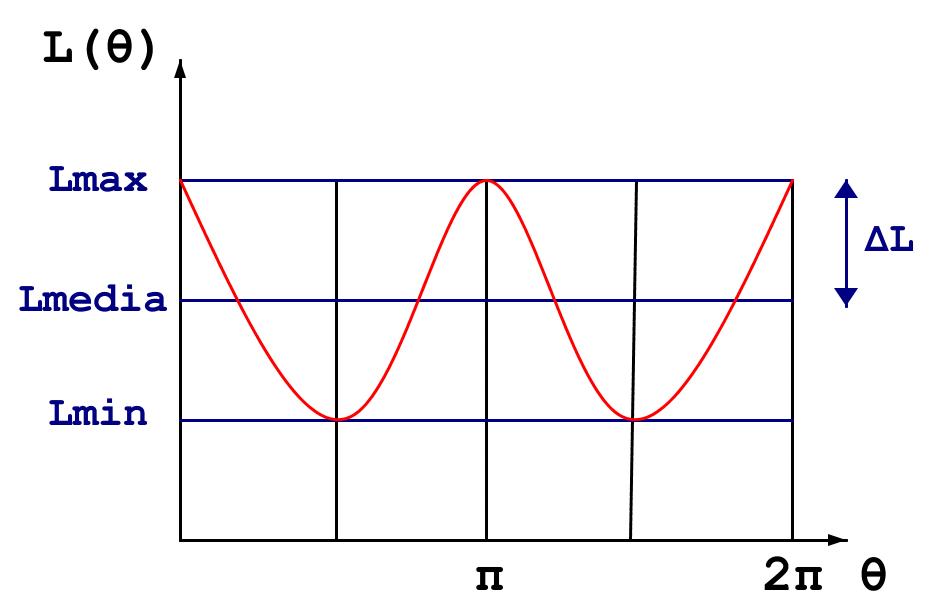
Innanzitutto si nota che la funzione è approssimabile con un coseno con periodicità 

Quindi:

Pertanto:

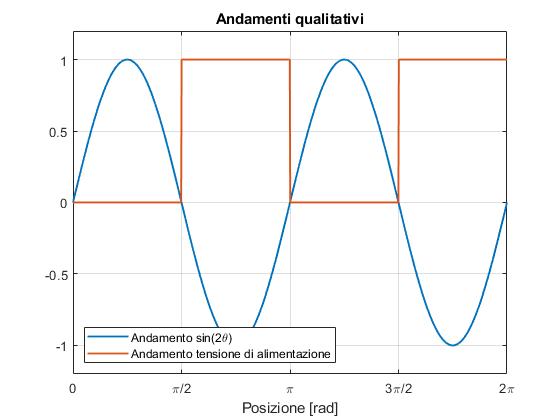
La prima considerazione che si può fare è che la direzione della coppia non dipende dal segno della corrente in quanto essa compare elevata al quadrato. Per avere coppia media positiva occorre alimentare opportunatamente la macchina dando corrente solo in determinate posizioni.
Occorre alimentare solo quando si ha la seguente condizione:

Si tratta quindi di una macchina sincrona in cui bisogna necessariamente conoscere la posizione del rotore per potere attuare un controllo.
Se al momento dell’avvio il rotore si trova in quadratura con lo statore, non vi è alcuna possibilità di far partire la macchina.

Pertanto si può pompare tutta la corrente che si riesce senza riuscire a muovere nulla.
Matteo Gentileschi
